




- @redparrot2008
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
这篇文章是关于作者折腾家庭NAS的经历。作者先分享了他之前使用斐讯N1盒子作为媒体服务器遇到的问题,然后介绍了他选择升级设备的思考过程,最终选择了小作坊组装的成品N100主机。他详细介绍了N100主机的配置和安装过程,并解释了为什么选择Unraid系统作为底层系统。作者还提到Unraid系统的一些不足之处,比如插件和Docker容器安装速度慢、虚拟机设置网络麻烦等。家庭NAS的进一步入门。书接上文

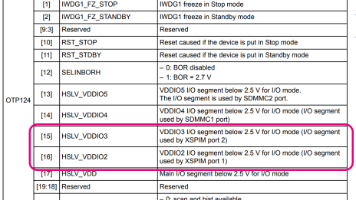
本文快速介绍了 STM32N6 的 OTP 位是什么以及如何对其进行编程。内容包括关于配置 OTP124 的分步说明和解释,通过 STM32CubeProgrammer 软件,OTP124 负责将 VDDIOs 的电压从 3.3V 更改为 1.8V。这使得 STM32N6570-DK 开发板能够在连接外部存储器时达到标称速度。STM32N6 系列微控制器使用一次性可编程(OTP)存储器来设置各种配
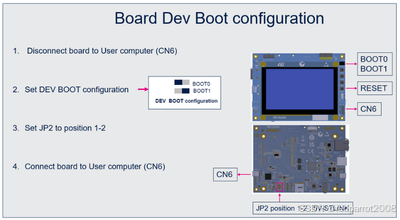
找到下载工具包下的文件STM32Cube_FW_N6_V1.0.0\Projects\STM32N6570-DK\Examples\GPIO\GPIO_IOToggle\STM32CubeIDE导入到项目。注意:Boot模式,RAM启动使用:BOOT0(1-2)和BOOT1(1-3);外部flash启动使用:BOOT0(1-2)和BOOT1(1-2)把STM32N6570-DK开发板BOOT1拨到

一旦引导 ROM 任务完成,它将跳转到 FSBL 项目,该项目通常负责执行 clock 和 system 设置,配置外部存储器,最后,它将应用程序二进制文件复制到内部 SRAM 中,或将外部存储器设置为存储器映射模式。本文提供了有关如何使用 FSBL 将应用程序从外部串行 NOR FLASH 复制到外部串行 PSRAM 的快速教程,包括配置和编程外部存储器的过程。成功完成构建后,我们将执行相同的步
上电时,boot ROM 将 FSBL 二进制文件从外部串行 NOR 闪存复制到内部 SRAM。一旦 boot ROM 任务完成,它将跳转到 FSBL 工程,FSBL 工程通常负责执行 clock 和 system 设置以及配置外部存储器。最后,它要么在内部 SRAM 中复制应用程序二进制文件,要么将外部存储器设置为内存映射模式。完成后,应用程序本身将启动并运行。如果您想了解更多关于 boot R
上电时,boot ROM 将 FSBL 二进制文件从外部存储器复制到内部 SRAM。一旦引导 ROM 任务完成,它将跳转到 FSBL 项目,该项目通常负责 执行时钟和系统设置,配置外部存储器,最后,它将 应用程序二进制文件复制到内部 SRAM 中或将外部存储器设置为内存映射模式.完成后,应用程序本身将启动并运行。如果您想了解更多关于 boot ROM 的信息,请查看这篇知识文章。
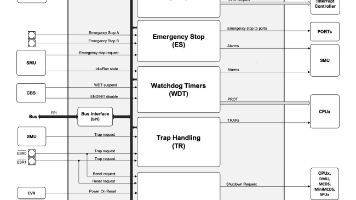
本文介绍了TC3xx系列芯片的看门狗定时器(WDT)及其安全机制。该芯片包含安全看门狗和多个CPU看门狗,每个看门狗具有三个寄存器,并集成ENDINIT保护机制防止关键寄存器意外写入。看门狗采用16位计数器,支持多种时钟频率和安全保护功能,包括密码访问、时序监控和特殊工作模式。当看门狗超时触发报警时,系统会启动恢复定时器(Recovery Timer)进行延时处理,超时后将产生复位信号。此外,TC
上电时,boot ROM 将 FSBL 二进制文件从外部存储器复制到内部 SRAM。一旦引导 ROM 任务完成,它将跳转到 FSBL 项目,该项目通常负责 执行时钟和系统设置,配置外部存储器,最后,它将 应用程序二进制文件复制到内部 SRAM 中或将外部存储器设置为内存映射模式.完成后,应用程序本身将启动并运行。如果您想了解更多关于 boot ROM 的信息,请查看这篇知识文章。
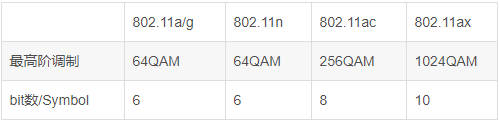
11n、11ac和11ax速率表肉冬瓜 2019-05-29 09:54:48 11841 已收藏 20展开速率计算方式Wi-Fi理论带宽 =(符号位长×码率×子载波数量×空间流)÷ 传输时间符号位长一个Symbol能承载的bit数量,这个与调试有关。码率Wi-Fi在传输时,根据空口环境的好坏,会加入不同数量的纠错码,用来提高传输的可靠性,空口环境越差,纠错码越多,真是数据占比越少,码率越低,反之
LIN(Local Interconnect Network)通信技术于2001年运用于汽车工业,作为CAN网络的一种补充,也属于一种低成本的串行总线技术,LIN总线网络采用单主多从的模式架构,使用单信号线进行传输,主、从节点间的通信有具体的规则,只有主节点需要,从节点才能发送信息,不需要总线仲裁。但是不是说什么技术好、什么技术先进,就都要上这种技术,毕竟主机厂做的是产品,是要追求利润的,因此,最
