




- @realman_Rop
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
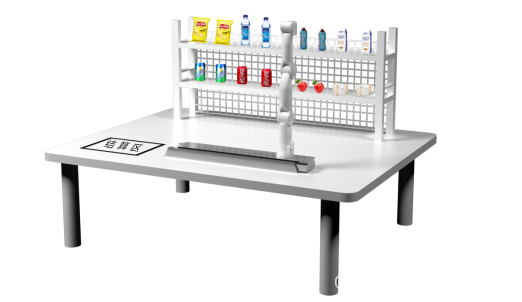
基于大模型的智慧零售教育科研平台集主控与执行机构与一体,主控中采用目前主流的大模型与图文生成技术,通过自然语言处理,实现对外部环境的感知与分析;通过构建庞大的数据集和复杂的算法模型,大模型能够实现对市场趋势的准确预测以及商品库存的智能管理,同时能够根据消费者的购物历史和偏好,提供定制化的购物体验,从而提高销售额和顾客满意度。基于大模型的智慧零售教育科研平台配套全面的实训内容与资料,为教育客户群体提
基于大模型的智慧零售教育科研平台集主控与执行机构与一体,主控中采用目前主流的大模型与图文生成技术,通过自然语言处理,实现对外部环境的感知与分析;通过构建庞大的数据集和复杂的算法模型,大模型能够实现对市场趋势的准确预测以及商品库存的智能管理,同时能够根据消费者的购物历史和偏好,提供定制化的购物体验,从而提高销售额和顾客满意度。基于大模型的智慧零售教育科研平台配套全面的实训内容与资料,为教育客户群体提
睿尔曼双臂复合机器人平台,旨在为机器人教育提供强大的实训平台,该平台全自主研发,实现机器人建图导航、路径规划,机械臂运动学、动力学、轨迹规划、视觉识别等算法和应用,提供开放式的软件框架,为教学和科研提供平台支撑。平台集成了移动底盘、深度视觉、语音模块、超轻量仿人机械臂、五指灵巧手、两指夹爪等各种仿人功能设备。同时在移动底盘上安装了超声波、激光雷达、视觉传感器,使该平台变得更加安全、智能。
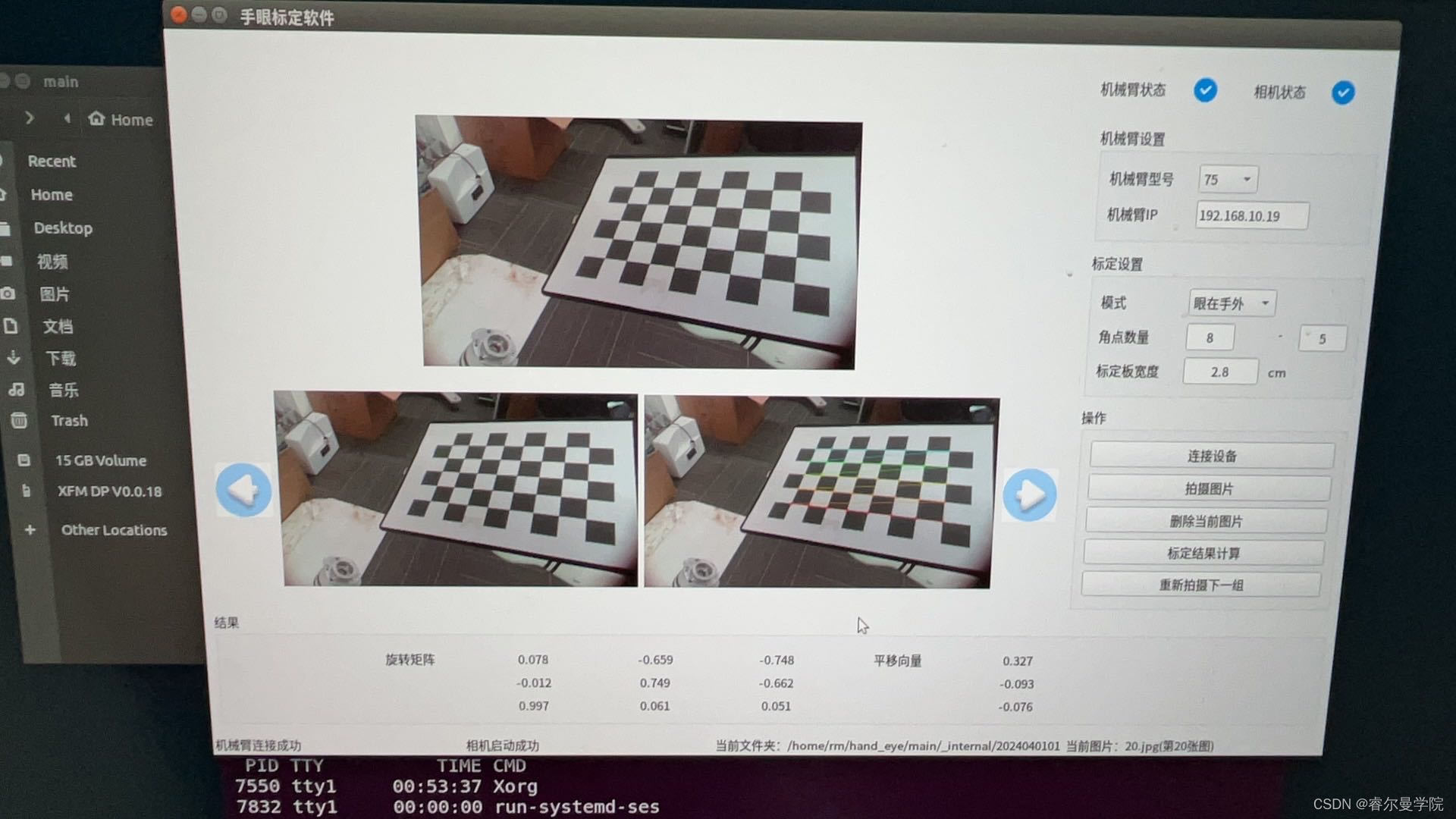
双臂复合升降机器人的手眼标定是属于眼在手外的标定模式,相机在机器人的头部,标定前应固定相机的位置,再打开我们的标定软件程序如下,给足文件权限后,打开主程序,运行后会出现如下界面。接下来将标定板固定在机械臂的末端,可以贴在灵巧手背面,然后进行图片的获取,变换不通的姿态,保证标定板在摄像头视野内部,然后点击拍摄图片进行图像获取。首次连接,选择机械臂型号,填入机械臂ip,选择标定模式,以及测量标定板的参
睿尔曼双臂复合机器人平台,旨在为机器人教育提供强大的实训平台,该平台全自主研发,实现机器人建图导航、路径规划,机械臂运动学、动力学、轨迹规划、视觉识别等算法和应用,提供开放式的软件框架,为教学和科研提供平台支撑。平台集成了移动底盘、深度视觉、语音模块、超轻量仿人机械臂、五指灵巧手、两指夹爪等各种仿人功能设备。同时在移动底盘上安装了超声波、激光雷达、视觉传感器,使该平台变得更加安全、智能。
关于在机械臂urdf中添加夹持器和夹持器固定板的urdf,建议是通过在solidworks构建好模型后再导出URDF文件,否则会出现些许安装误差。

双臂复合升降机器人的手眼标定是属于眼在手外的标定模式,相机在机器人的头部,标定前应固定相机的位置,再打开我们的标定软件程序如下,给足文件权限后,打开主程序,运行后会出现如下界面。接下来将标定板固定在机械臂的末端,可以贴在灵巧手背面,然后进行图片的获取,变换不通的姿态,保证标定板在摄像头视野内部,然后点击拍摄图片进行图像获取。首次连接,选择机械臂型号,填入机械臂ip,选择标定模式,以及测量标定板的参