- @qqliuzhitong
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
效果:电脑有点卡,这个估计不是程序步态帧太少的原因。等我换个主机试试看。六足机器人单腿运动学仿真(ROS+RVIZ)程序:#include <iostream>#include <string>#include <vector>#include "ros/ros.h"#include "sensor_msgs/JointState.h"#include "tur
1.给esp8266模块烧录透传程序这个程序烧录进esp8266模块之后,它就可以接收手机指令了。//修改自:https://blog.csdn.net/wangke0809/article/details/70146378?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522163566195516780261935125%2522%2
Arduino主控,图形化编程,趣味学习Arduino nano开发板+舵机扩展底板4.8V可充电电池,支持Arduino C语言编程和米思齐图形化编程开源代码,注释详细,运动学解算。1.2Baize_Spider12: 一个四足蜘蛛机器人 - Gitee.com根目录如下图所示,资料里面一共有6个文件夹,还有一个“Baize_spider入门级制作教程.pdf” 的文件,这个pdf文件是整个机器

PC端代码:#include <termios.h>#include <signal.h>#include <math.h>#include <stdio.h>#include <stdlib.h>#include <sys/poll.h>#include <boost/thread/thread.hpp>#inc
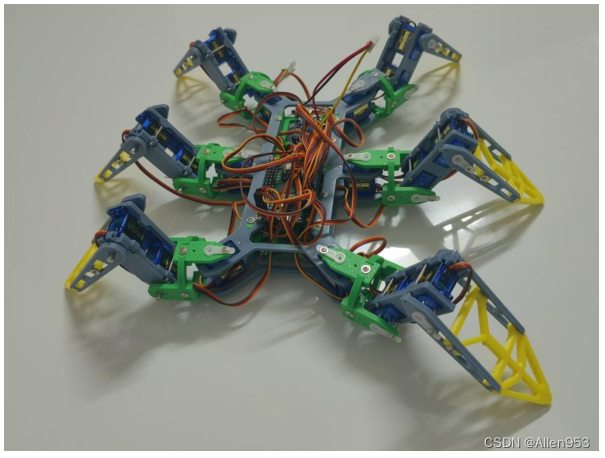
1.项目介绍学习ros机器人需要,打算做一个六足机器人,像这样的:2.组装调试教程3.编程例程
自制无刷电机驱动器Baize_foc,测试无刷电机。

代码:注意:这行代码一定要加,这样可以让matlab的横纵轴同一刻度等长,要不然会不等长就看起来像椭圆一样。
这是个arduino温湿度传感器程序,当温度大于30度,则开启继电器连接的风扇。代码:#include <DHT.h>#include <Servo.h>#define sv 8//8好引脚连接舵机#define jd 2//连接继电器DHT dht(3, DHT11);//2号引脚连接dht11的DATA引脚Servo myservo0;void setup(void)
Gazebo : Tutorials
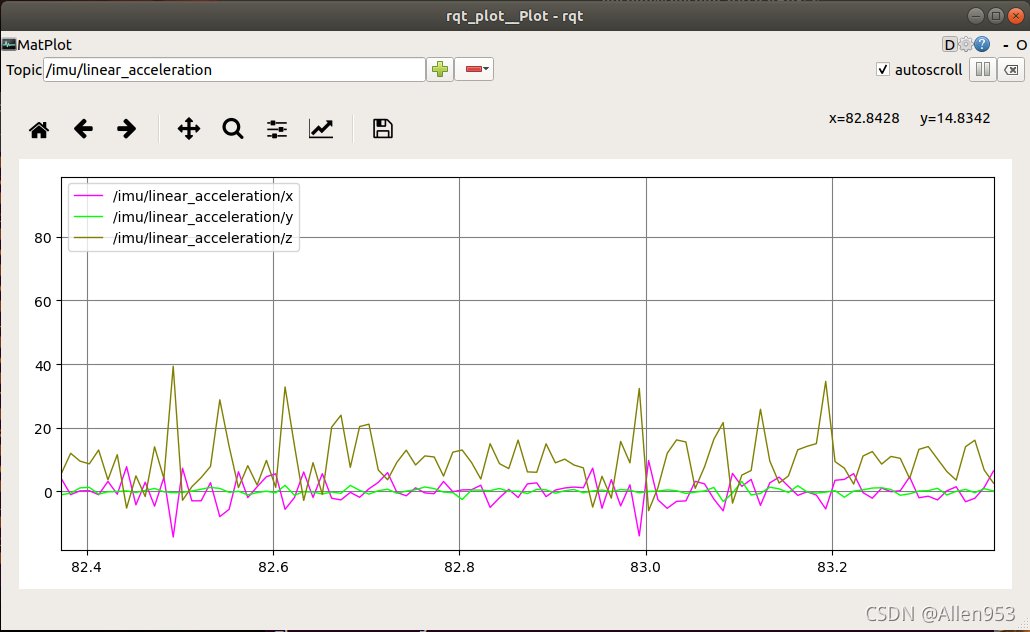
在ROS里rqt_plot是ROS内置的一款用于绘图的可视化插件。它可以读取话题中发布的数据,将类型允许的数据绘制成为图像。在终端中运行以下节点可打开rqt_plot: