
写文章




- @qq_63079839
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
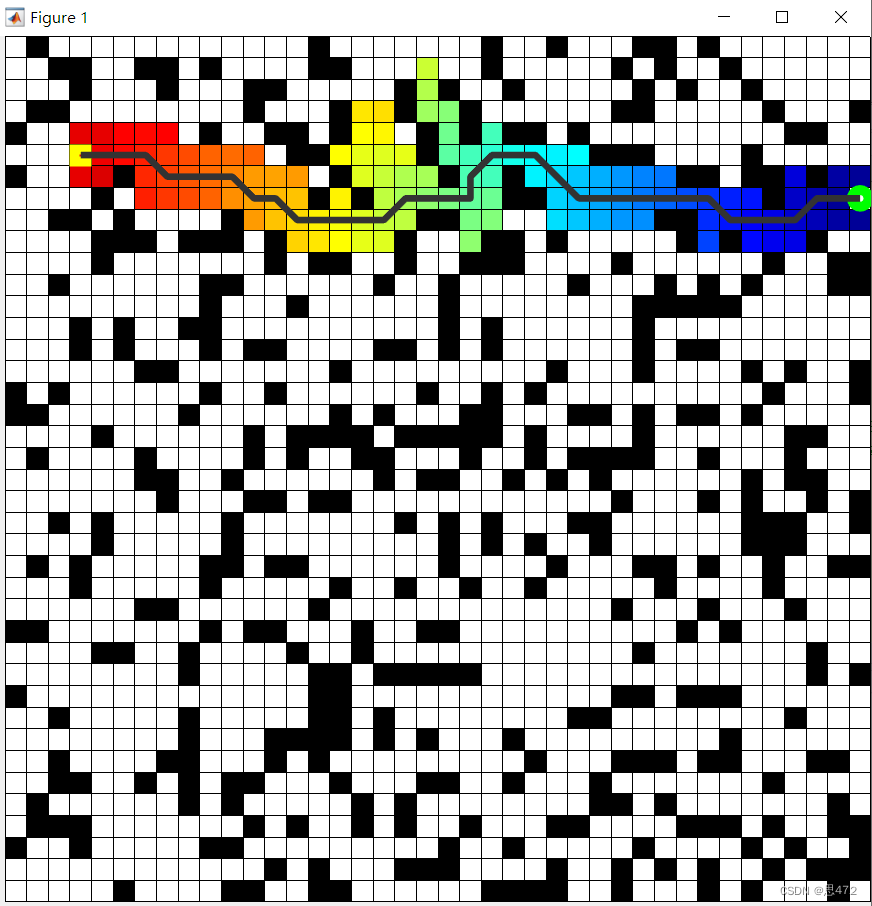
在matlab中使用A*算法进行二维路径规划
增设参数Corner_obstacles,在计算斜向拓展代价时,判断垂直其拓展方向的两侧有没有障碍物,如向父节点左上方拓展时,需判断父节点的左方以及上方是否有障碍物,若有则不能拓展,以此获得不触碰障碍物四角的安全路线,如右下图。考虑无人机等在进行直角拐弯时,速度会受到影响,进而增加耗能,因此增设参数quarter_turn表示每一次直角拐弯的代价,使规划的路径尽可能减少直角拐弯的次数,也使的路径更
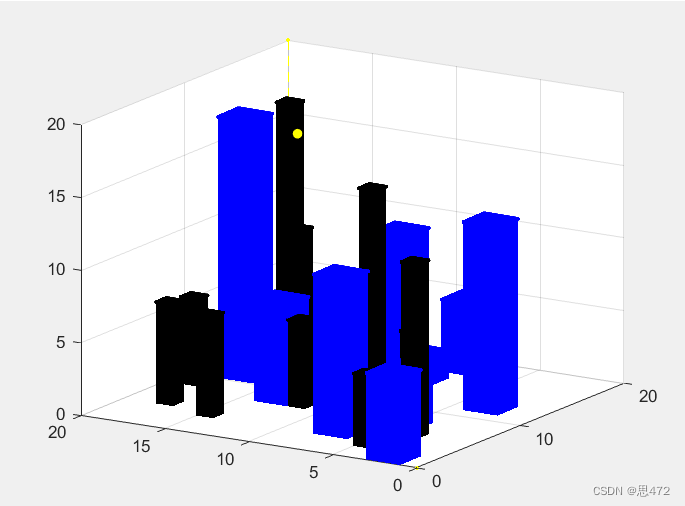
在matlab中使用A*算法进行三维路径规划
本文基于城市低空物流无人机作业的背景,进行三维环境建模和算法实现和改进,以之前二维路径规划的内容为基础,做适量改动,并结合实际对算法提供改进思路。
到底了