
写文章




- @qq_58816598
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
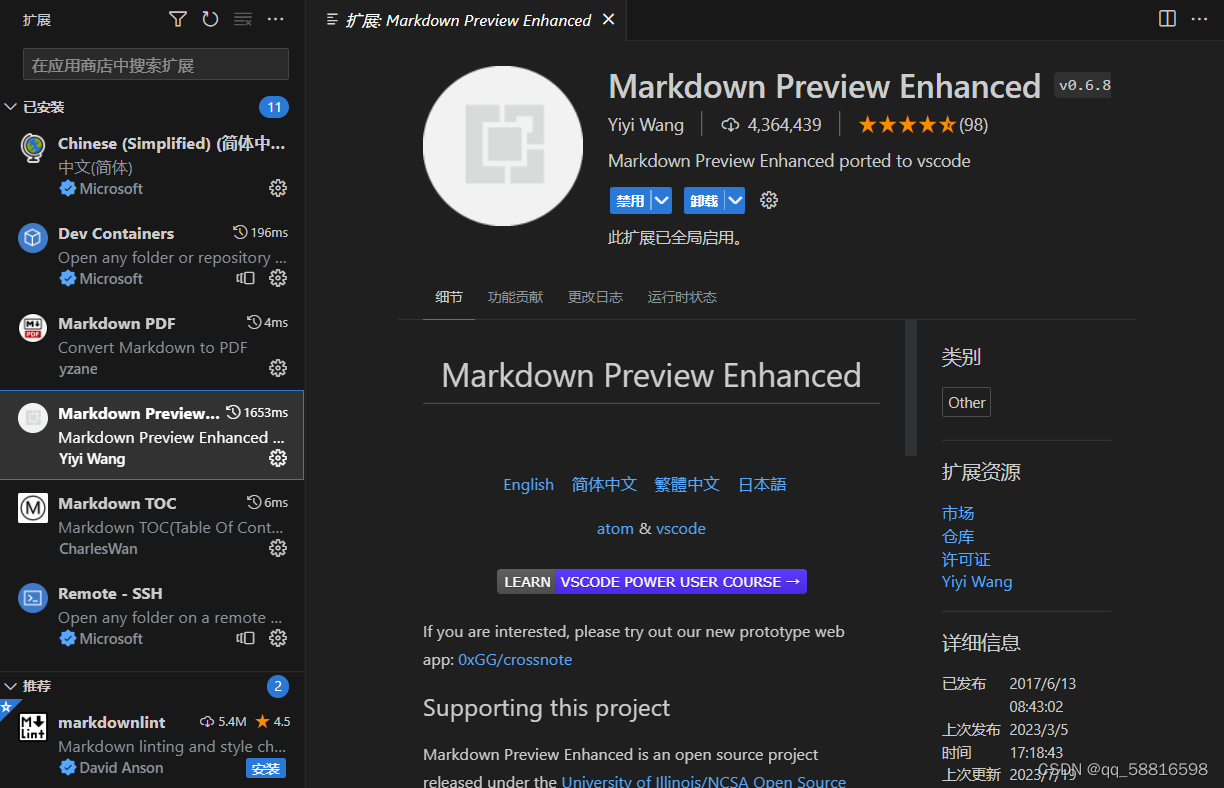
vscode编写markdown文本,转换成pdf出现错误:“princexml” is required to be installed.
在使用vscode进行编写markdown文档时,我们通过安装两个插件,分别是Markdown Preview Enhanced和Markdown PDF,分别实现对markdown文本的预览功能和格式转换功能(转化成PDF)。当我们编写好一份markdown文本之后,点击右上角的。之后在右侧弹出的预览界面的空白处右击鼠标,选择。电脑没有安装Prince软件。
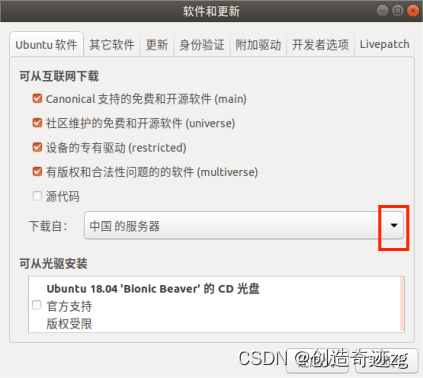
虚拟机上的ubuntu安装ROS
安装ROS之前,我们需要先安装虚拟机和ubuntu,这个大家网上找教程安装就可以。本次记录主要是为了学习视觉引导机器人机械臂的抓取,在此之前需要安装好ROS系统,但在安装过程中遇到一些问题就此记录一下并和大家分享。虚拟机安装+Ubuntu安装+ROS安装虚拟机快照详解。
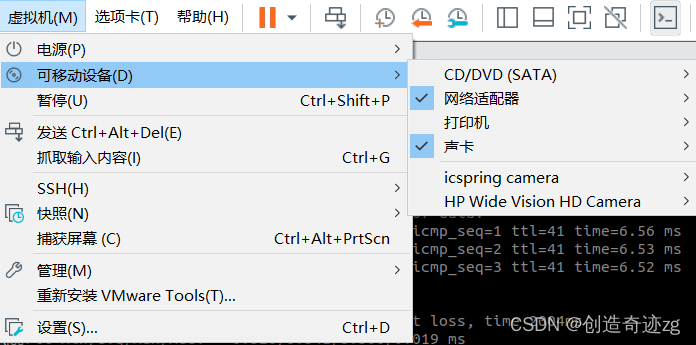
基于虚拟机安装Ubuntu18.04+ROS的2D相机或电脑自带摄像头的在线标定方法
我的是将usb2.0换成usb3.0,然后在虚拟机->可移动设备中看到了我的电脑自带摄像头和usb连接的摄像头,然后选择对应摄像头,点击“连接”,如下几幅图所示操作即可。:虚拟机+ubuntu18.04+ROS1 melodic(针对ubuntu18.04对应的ROS版本):笔记本电脑自带摄像头或者通过usb接口连接的相机。6. 新建终端,启动相机标定包。表示相机没有被虚拟机检测到。
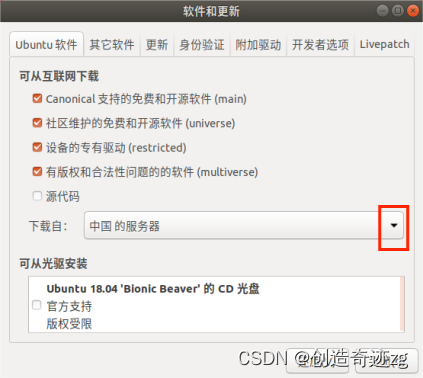
虚拟机上的ubuntu安装ROS
安装ROS之前,我们需要先安装虚拟机和ubuntu,这个大家网上找教程安装就可以。本次记录主要是为了学习视觉引导机器人机械臂的抓取,在此之前需要安装好ROS系统,但在安装过程中遇到一些问题就此记录一下并和大家分享。虚拟机安装+Ubuntu安装+ROS安装虚拟机快照详解。
到底了