
写文章




- @qq_57371368
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
英伟达NVIDIA Jetson Xavier NX入门,从裸机环境配置到部署yolov5并成功运行,包括训练自己的模型
在cmake编译之前,手动下载cmake过程中缺失的依赖https://files.cnblogs.com/files/arxive/boostdesc_bgm.i%2Cvgg_generated_48.i%E7%AD%89.rar。pytorch版本不能随意安装,必须安装英伟达编译的好的库文件,链接:https://forums.developer.nvidia.com/t/pytorch-fo

Yolov5训练模型时报错RuntimeError: result type Float can t be cast to the desired output type long int
这种问题通常发生在 PyTorch 中,因为 PyTorch 张量具有动态数据类型,而在某些情况下,对数据类型的隐式转换可能会导致问题。确保在处理张量时,特别是在构建元组或列表时,要确保数据类型的一致性,以避免此类错误。返回的张量可能包含浮点数,而在你的元组中,它们需要被转换成整数。在 Python 中,将浮点数强制转换为整数可能会导致数据类型错误,因为浮点数不能直接转换为整数。这样就避免了直接修
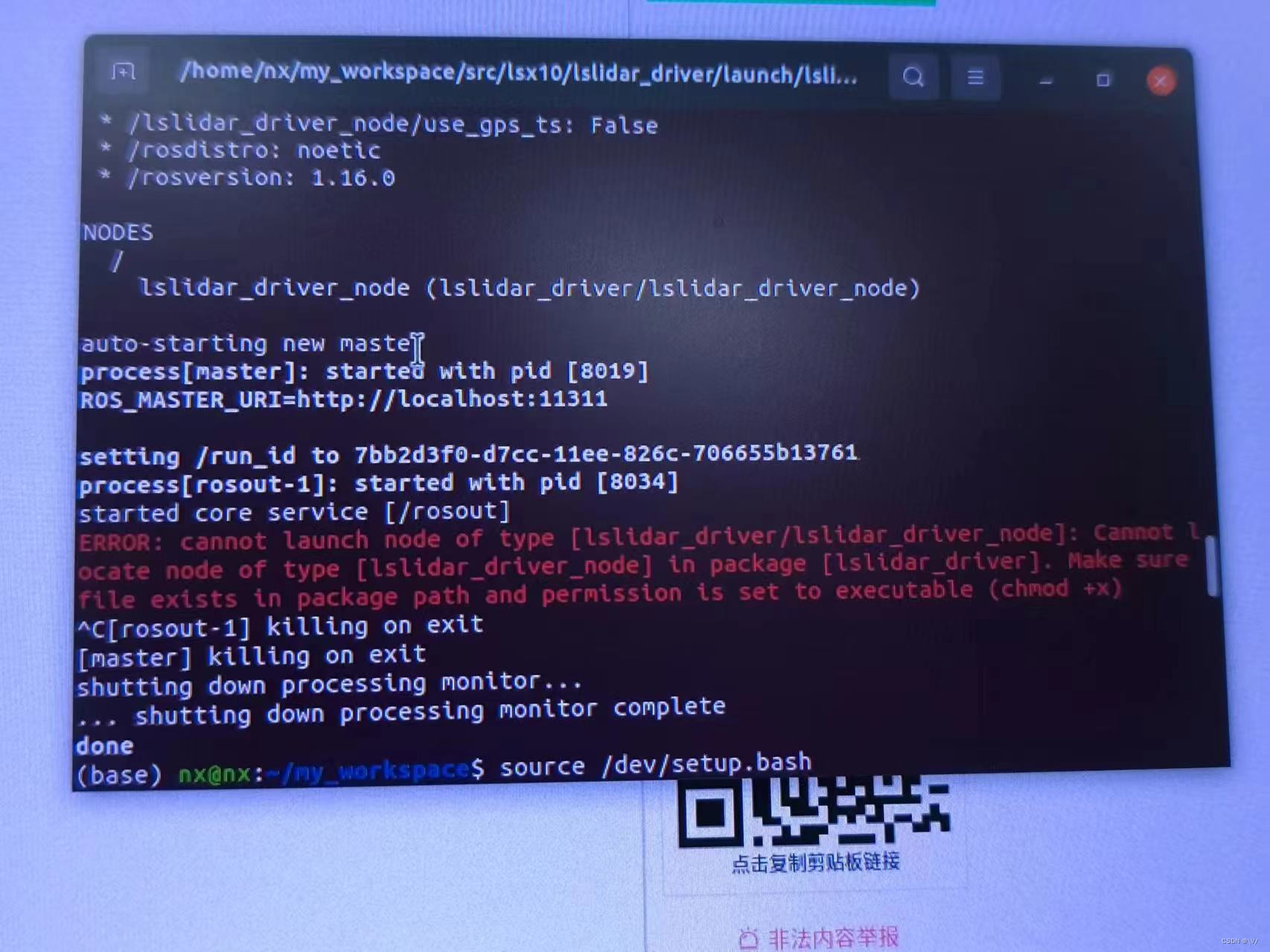
镭神N10P激光雷达ERROR: cannot launch node of type [lslidar_driver/lslidar_driver_node]: Cannot locate node
完整报错内容:ERROR: cannot launch node of type [lslidar_driver/lslidar_driver_node]: Cannot locate node of type [lslidar_driver_node] in package [lslidar_driver]. Make sure file exists in package path and p
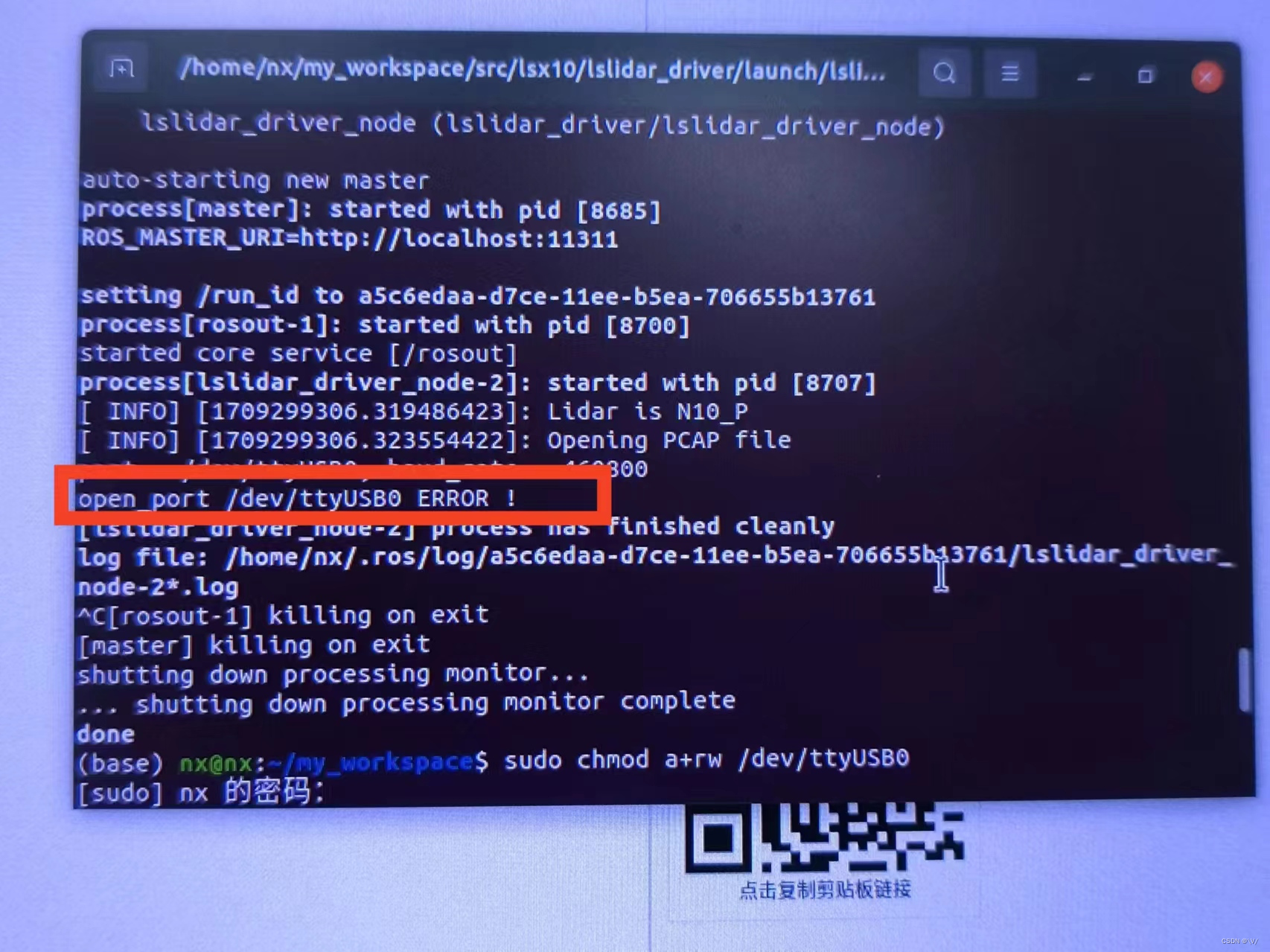
镭神N10P激光雷达open_port /dev/ttyUSB0 ERROR !/open_port /dev/wheeltec_lidar ERROR !
显示报错:(或者显示open_port /dev/wheeltec_lidar ERROR!解决方法:给串口增加权限。
到底了