
写文章




- @qq_53186375
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
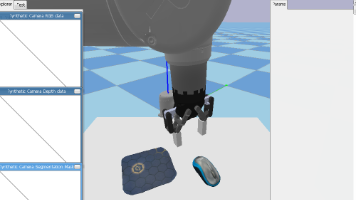
Pybullet环境中搭建一个UR10机械臂带Robotiq夹爪并实现一个简单的抓取任务
本文介绍了基于PyBullet搭建UR10机械臂仿真环境的方法。主要内容包括:1)通过UR10_Sim_Env类实现基础仿真环境搭建,包含UR10机械臂、夹爪和桌面加载;2)使用GripperController类实现夹爪控制,包含开合动作和抓取检测功能;3)通过UR10_Move_Controller类实现机械臂运动控制,支持关节空间和笛卡尔空间轨迹规划。最后展示了抓取鼠标的示例任务,包含物体加
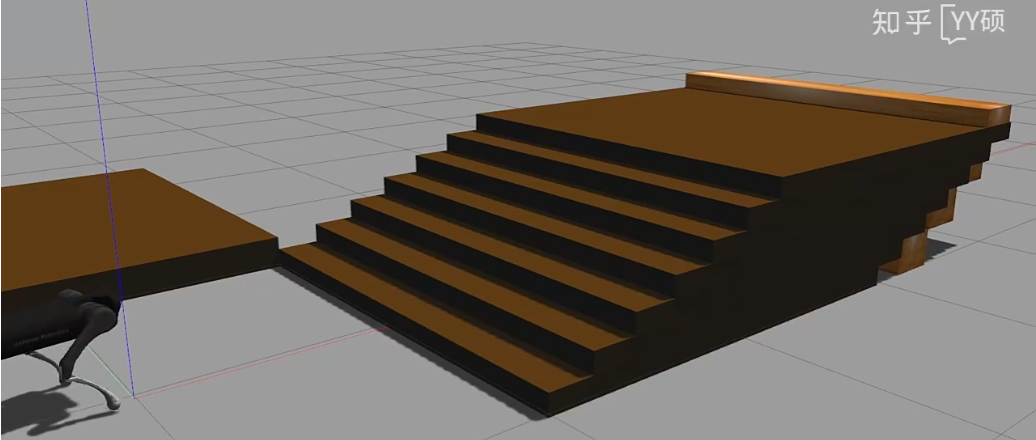
宇树科技A1机器狗开源QP-MPC-Controller仿真环境搭建及运行
本文主要用于说明如何搭建宇树科技A1四足机器人开源代码运行环境,代码老祖是MIT的开源代码,思想是一样的,环境配置比较复杂,网上保姆级教程较少,因此在这里我提取一位大佬的网页内容来供大家交流学习,需要提前准备好一个游戏手柄,键盘无法控制机器狗运动,原始仓库采用 Docker 安装依赖环境,其实不用 Docker 也能跑,即使电脑不用gpu也能跑
到底了