




- @qq_51065725
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
在现代电子设计中,低压差线性稳压器(LDO)因其高效、低噪声和简单易用的特性,广泛应用于各种电源管理场景。本文将以MD7612系列的MD7612A33PA1为例,详细解读LDO的关键参数、功能和应用。

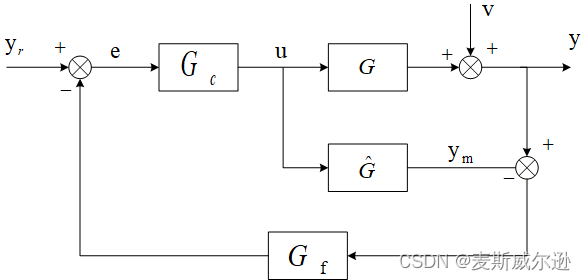
描述的辨识模型示意图如上图所示,它把输出表示为参数的线性组合形式,是辨识问题的一个基本表达形式,称为最小二乘格式。因为这个最小二乘格式辨识模型的参数向量易于用最小二乘方法辨识。本文主要说明如何把系统模型化为最小二乘格式。

递推最小二乘算法(RLS)是一种用于在线计算线性回归的方法。该算法可以在不需要保存所有数据的情况下,使用最小二乘法递推地计算线性回归系数。具体地说,该算法在每次接收一个新的样本时,会根据已经处理过的样本和相应的预测值,递推地更新线性回归系数。这样,就可以利用新的样本来更新模型,而不需要重新计算所有样本。递推最小二乘算法的优点是可以在不需要保存全部数据的情况下,快速计算出线性回归系数。因此,它在处理

数学模型有确定性和随机性之分,模型中变量受到随机干扰的系统称为随机系统,反之为确定系统。本文会介绍随机系统的各个数学模型。

内模控制(Internal Model Control,IMC)是一种用于控制系统中的模型,基于模型预测和误差补偿的原理。其核心思想是在控制系统中加入一个内部模型,通过与实际系统输出进行比较,并根据差异进行补偿控制,从而实现对系统的精确控制。IMC可以应用到多种领域,同时也为分析一些其他控制算法的性质提供了结构框架。
在上一篇文章中,我们深入探讨了Willems基本引理,这一理论为理解和优化动态系统提供了强有力的工具。现在我们将这一理论应用到模型预测控制(MPC)中,探索其在实际控制系统中的潜力。但在深入讨论之前,让我们先回顾一下传统的模型预测控制。

线性代数问题是科学技术中最常见的问题,矩阵在工程数学中应用得非常广泛,因此学会创建出自己想要的矩阵是非常重要的,本文讲解利用MATLAB创建常用的矩阵。函数使用说明创建一个n*m的零矩阵创建一个n*m的幺矩阵A=eye(n)创建一个n*n的单位矩阵c向量为H矩阵的第一列元素取值,r向量为H矩阵的最后一行元素取值A=diag(v)生成主对角线元素为向量v的对角矩阵Av=diag(A)返回矩阵A的主对

判断(A,b)能控性。若完全能控,进入下一步;若完全不能控,则不能进行所有极点配置。给定一个n维单输入连续时间线性时不变受控系统。给定单输入3维连续时间线性时不变受控系统为。,求满足极点配置要求的状态反馈矩阵。和上一个程序运行的结果相同。和一组任意的期望闭环特征值。计算能控规范形变换矩阵。计算有期望闭环特征值。

动态矩阵控制(Dynamic Matrix Control,DMC)起源于20世纪70年代,是一种基于数学模型的先进控制算法,在化工、电力、冶金、制药等领域得到了广泛的应用。传统控制算法主要是基于PID控制器,但对于复杂的动态过程,PID控制器并不能提供良好的控制效果。相比之下,DMC控制算法的控制性能更好,可以适应更为复杂的过程控制。 DMC是一种基于阶跃响应的预测控制算法,因而适用于渐进稳定的
