- @qq_45290757
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
很多人学 STM32,都是从点灯、串口、定时器开始的。“STM32 GPIO 输入输出模式都有哪些?空闲状态是什么?“GPIO 如何触发外部中断?EXTI 怎么配置?“NVIC 的抢占优先级和响应优先级是什么?怎么理解?“开漏和推挽输出有什么区别?什么时候用哪一个?GPIO 的工作原理和模式STM32 的中断体系(EXTI + NVIC)STM32 上电或复位后,不会直接进入 main,而是先从启
本文从底层角度讲解 STM32 的启动流程与时钟树机制,解析 MCU 从复位到进入 main() 的全过程,以及 BOOT 启动模式的作用。结合 STM32F103,重点说明时钟来源、PLL 倍频与 72MHz 主频实现,并梳理 SYSCLK 到 AHB/APB 及外设的分配逻辑,解答定时器倍频、ADC 与 USB 时钟限制等常见问题,帮助建立完整的运行机制认知。

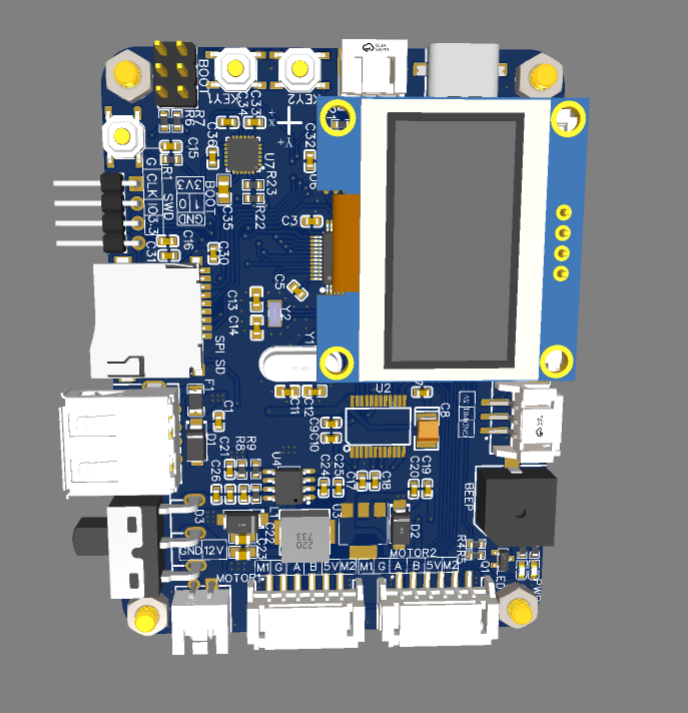
文章目录项目往期文章一、电路设计环境搭建1.1 EDA软件安装1.2 立创开源广场二、原理图设计2.1 硬件的系统设计2.2 电源部分(Power)2.2.1 MP2482的降压方案2.2.2AMS1117的降压方案2.2.3 电源接口与保护2.3 最小系统(SystemCore)2.4 外设部分(HardWear)2.4.1 GPIO外设电路2.4.2 串口接口电路2.4.3 I2C接口电路2.
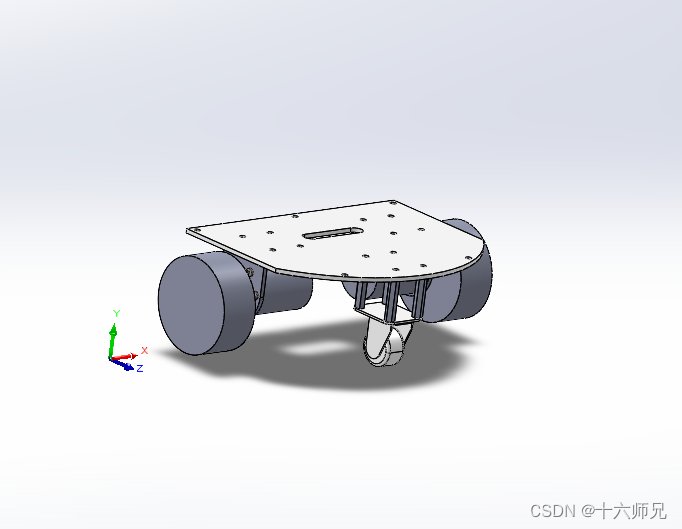
本项目的主要目标是设计和开发一个具有SLAM功能的小型移动机器人。通过该项目,我们将深入探讨SLAM技术的核心概念,包括传感器融合、数据处理算法、运动学模型等方面的知识。同时,我们将以实践为主线,引导读者从零开始,逐步完成一个完整的SLAM机器人系统。SLAM(Simultaneous Localization and Mapping),即建图与导航。SLAM机器人是一类拥有自主定位和地图构建能力