- @qq_42874652
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
具身智能是一种人工智能研究范式,它强调智能体通过与物理环境的交互来获得智能。与传统的基于规则或符号的人工智能不同,具身智能将感知和行动相结合,使智能体能够更好地理解其周围的环境和与环境的互动。具身智能的核心在于智能体必须拥有物理身体,并通过这个身体与环境进行实时互动,从而实现感知、学习和行动。轨迹预测是运动预测的一个子领域,它指的是在给定一个目标(如行人或车辆)过去或当前运动轨迹的情况下,对其未来

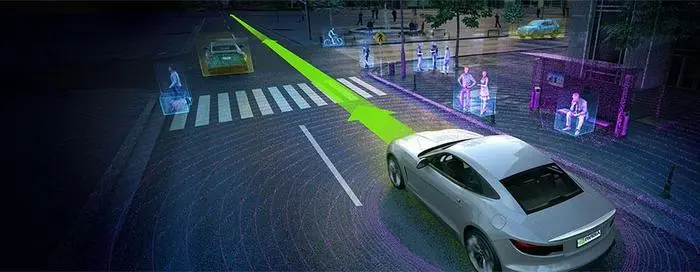
行人轨迹预测旨在利用观察到的人类历史轨迹和周围环境信息来预测目标行人未来的位置信息,该研究具有重要应用价值,可以降低自动驾驶车辆在社会交互下的碰撞风险。然而,传统的模型驱动的行人轨迹预测方法难以在复杂高动态的场景下对行人进行轨迹预测。相比之下,数据驱动的行人轨迹预测方法依靠大规模数据集平台,可以更好地捕捉和建模更复杂的行人交互关系,进而取得较精准的行人轨迹预测效果,成为自动驾驶、机器人导航和视频监

具身智能是一种人工智能研究范式,它强调智能体通过与物理环境的交互来获得智能。与传统的基于规则或符号的人工智能不同,具身智能将感知和行动相结合,使智能体能够更好地理解其周围的环境和与环境的互动。具身智能的核心在于智能体必须拥有物理身体,并通过这个身体与环境进行实时互动,从而实现感知、学习和行动。轨迹预测是运动预测的一个子领域,它指的是在给定一个目标(如行人或车辆)过去或当前运动轨迹的情况下,对其未来
具身智能是一种人工智能研究范式,它强调智能体通过与物理环境的交互来获得智能。与传统的基于规则或符号的人工智能不同,具身智能将感知和行动相结合,使智能体能够更好地理解其周围的环境和与环境的互动。具身智能的核心在于智能体必须拥有物理身体,并通过这个身体与环境进行实时互动,从而实现感知、学习和行动。轨迹预测是运动预测的一个子领域,它指的是在给定一个目标(如行人或车辆)过去或当前运动轨迹的情况下,对其未来
自动驾驶车辆在复杂高动态的交通场景中准确预测道路交通参与者的轨迹是一项充满挑战性的任务,因为智能体的运动模式是复杂且随机的,其不仅取决于自身过去的轨迹,而且与周围其他类型交通参与者的社交互动密切相关。