- @qq_38960753
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
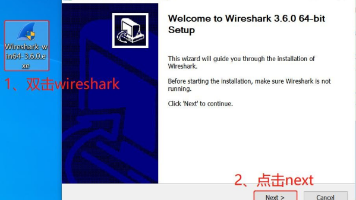
Wireshark软件是网络调试不可或缺的小工具,对于分析网络包起到关键的作用UI界面和命令行。命令行抓包采用 Dumpcap,比使用UI 界面抓包更加节省资源,内存消耗较少,且可以开启循环抓包,进一步减少内存消耗。
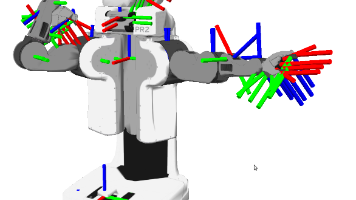
在机器人系统中,机器人身上往往安装了多种传感器:激光雷达、RGB-D 相机、IMU、超声波、GPS 等等。每种传感器都有自己的"参考坐标系"——激光雷达测到的障碍物坐标是相对于激光雷达本身的,相机拍到的目标也是相对于相机镜头中心的。 然而,我们真正关心的往往是:这个障碍物或目标相对于机器人底盘在哪里?或者相对于世界地图在哪里? 这就是 TF(Transform Framework)要

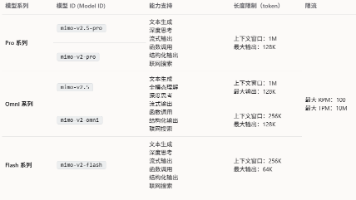
TRAE是字节跳动推出的AI编程IDE,内置豆包、DeepSeek等模型,同时支持接入自定义 OpenAI 兼容模型。小米MiMo模型的API完全兼容OpenAI格式,原则上是可以无缝接入TRAE。但实际情况并没有那么顺利。本文将手把手教你完成从获取API Key到在TRAE中成功调用MiMo模型]的全流程。打开TRAE IDE点击界面右上角的 ⚙️设置图标在左侧导航栏选择模型(Models)点击
TRAE是字节跳动推出的AI编程IDE,内置豆包、DeepSeek等模型,同时支持接入自定义 OpenAI 兼容模型。小米MiMo模型的API完全兼容OpenAI格式,原则上是可以无缝接入TRAE。但实际情况并没有那么顺利。本文将手把手教你完成从获取API Key到在TRAE中成功调用MiMo模型]的全流程。打开TRAE IDE点击界面右上角的 ⚙️设置图标在左侧导航栏选择模型(Models)点击
从"调参数的人"到"定义问题的人"——一条不被淘汰的进化路径2026年,某头部手机代工厂引入一套基于大模型的视觉质检系统,原来需要8 名视觉调试工程师驻场3个月的项目,2 名工程师 + AI 平台 2 周交付。这不是个案,而是正在发生的行业剧变。机器视觉工程师这个职业不会消失,但"只会在界面上拖拖拽拽调参数"的视觉调试岗位会大量消失。未来的机器视觉工程师,本质上是"工业AI视觉系统的架构师"懂算法
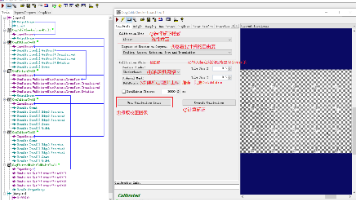
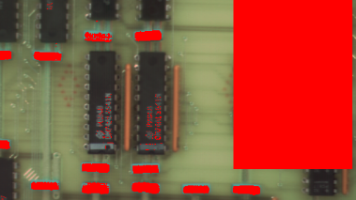
/ 自定义棋盘格参数// X方向11个内角点// Y方向8个内角点// 5mm单元格// 选择校准空间标定板选择:推荐使用陶瓷或玻璃材质的高精度标定板,避免打印标定板的热胀冷缩图像采集:标定图像应覆盖整个视野,包括边缘和四角,至少10-15 幅误差评估:平均重投影误差应< 0.5 像素,最大误差应< 1.0 像素坐标系命名:使用有意义的名称(如 “PartCoord”、“BeltCoord”),避
超盒分类(Hyperboxes Classification)是 Halcon 机器视觉软件中一种经典且直观的分类方法。在工业视觉检测和图像处理领域,分类就是将一个对象划分到若干预定义类别中的某一个。在流水线上,将金属零件分为螺母、垫圈和挡圈三类在农产品分拣中,区分橘子和柠檬在印刷品检测中,判断印刷图案是否存在缺陷分类器全称特点Hyperbox超盒分类器简单直观,轴平行边界GMM高斯混合模型概率模
PCL是在吸收了前人点云相关研究基础上建立起来的大型跨平台开源C++编程库,它实现了大量点云相关的通用算法和高效数据结构,涉及到点云获取、滤波、分割、配准、检索、特征提取、识别、追踪、曲面重建、可视化等。如果说OpenCV是2D信息获取与处理的结晶,那么PCL就在3D信息获取与处理上具有相同的地位。
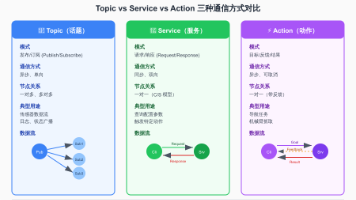
Service是ROS中的同步请求/响应通信机制。:提供服务的一方,等待请求并返回结果:使用服务的一方,发送请求并等待响应每个Service 都有一个唯一的名称(如),Client 通过这个名称找到Server并发起调用。Service 的数据结构由.srvRequest(请求):Client发送给Server的数据Response(响应):Server返回给Client的数据│ Service