
写文章




- @qq_35598561
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
英伟达Jetson Orin nano super使用大模型——deepseek等
英伟达Jetson Orin nano super使用大模型——deepseek等

英伟达Jetson Orin nano super使用大模型——deepseek等
英伟达Jetson Orin nano super使用大模型——deepseek等
vscode设置ROS开发环境
vscode设置ROS开发环境
使用web_video_server进行网页段的视频传输
使用web_video_server进行网页段的视频传输

ROS不同版本采用的Python版本以及C++和Python的使用区别
ROS 常见知识点总结
基于PX4的无人船组装
基于PX4的无人船组装配件购买地址无人机本身是一个复杂的、庞大的无人设备,涉及到的知识面非常广,好在PX4和ROS都已经将无人机的各种功能进行了封装,这就给初学者提供了极大的便利。考虑到二次开发的使用,仍然需要具备以下基础基础知识:模拟电子基础,数字电子基础,C/C++,单片机(STM32系列),嵌入式linux, ubuntu操作系统的使用。1、网上教程多种多样,链接进攻参考,C++教程链接:链
仿pix2.4.6从与原理图导出PCB时所有元件都提示找不到封装解决办法
打开pcb页面,点击设计->生成pcb库原理图元件的封装设置为任意如果生成PCB库的时候生成的不全,可以生成集成库点击设计-》生成集成库,生成后如下生成后双击一个原理图封装,在下图红圈区域点击一下,会显示对应的pCB封装,表示已经找到封装,可以导入到PCB...
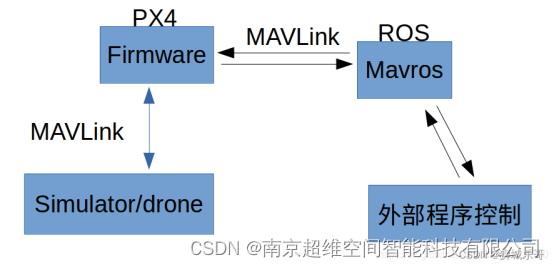
MAVROS的进一步理解
MAVROS的进一步理解
超维小课堂 | 4、MAVROS常用话题简介
超维小课堂 | 4、MAVROS常用话题简介
到底了