
写文章




- @qq_19469271
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
手把手教你如何安装ROS+Gazebo+PX4开发环境(ubuntu18.04 + Melodic)
参考PX4官网,做如下总结:1、安装 Ubuntu + ROS 步骤省略2、下载PX4源码

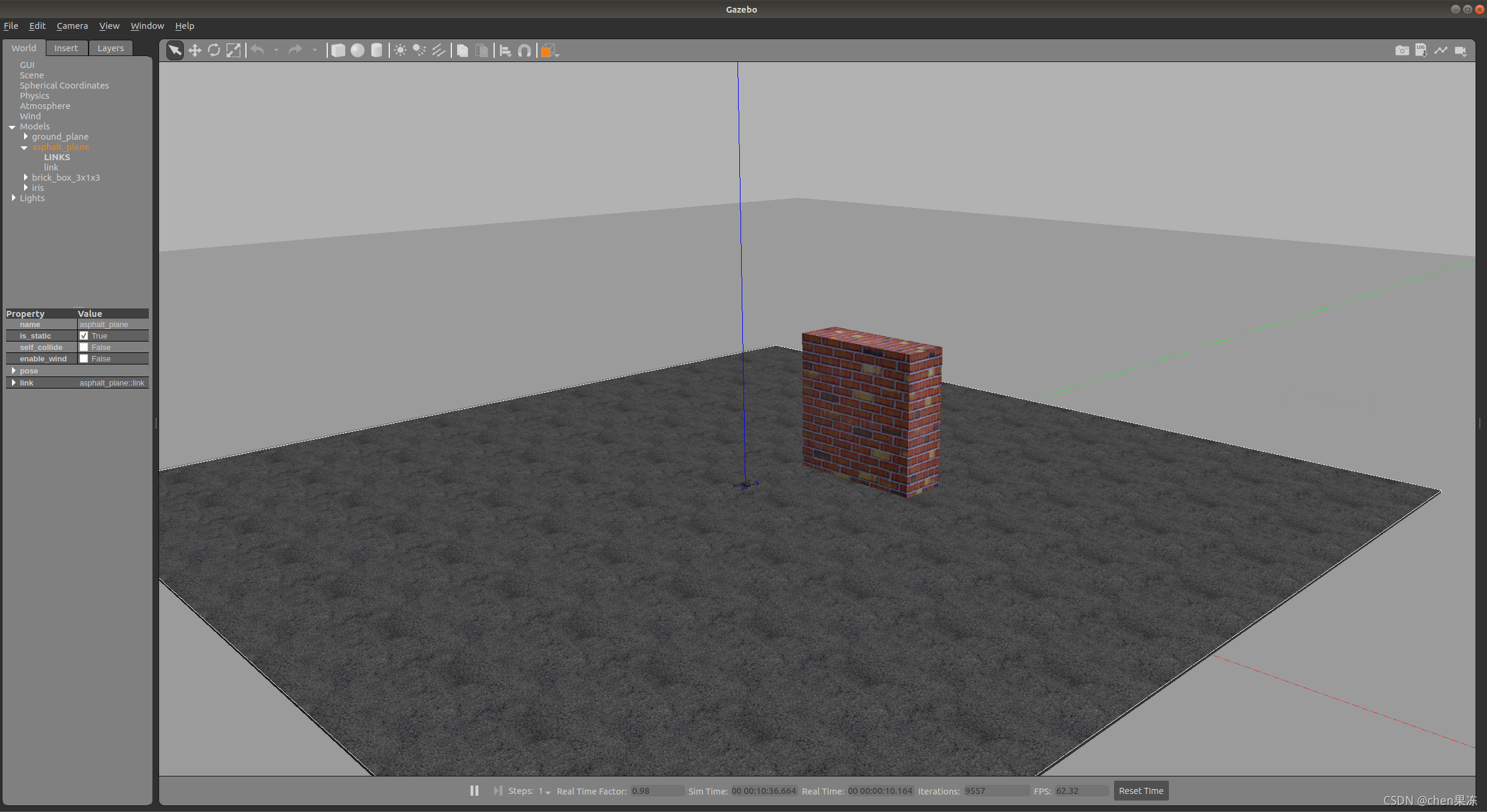
PX4仿真时,如何在Gazebo下添加物理环境
1、安装Gazebo,步骤略2、下载安装Gazebo需要的世界模型,否则自动安装速度很慢3、在Ubuntu终端里输入 gazebo ,打开一个空的 Gazebo 界面4、点击左上方的 insert ,选择要添加的模型5、布置好模型后,保存,命名为 myworld.world6、将保存好的myworld.world 文件拷贝到 /PX4目录下/Tools/sitl_gazebo/worlds/hom
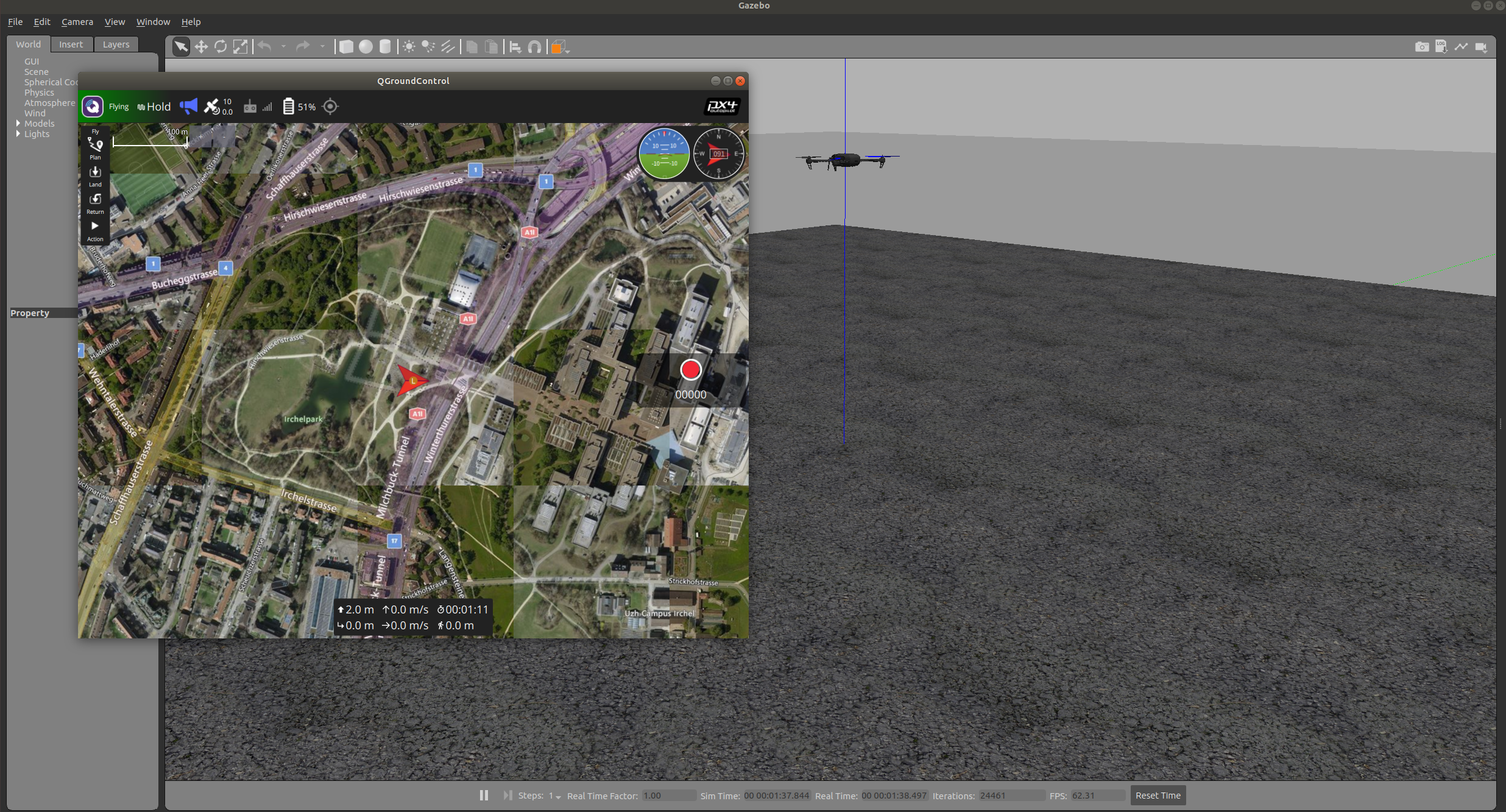
ROS+Gazebo+PX4仿真步骤
本文参考链接:[入门教程] PX4-Gazebo仿真 - 知乎 (zhihu.com)1、参照上一个帖子手把手教你如何安装ROS+Gazebo+PX4开发环境(ubuntu18.04 + Melodic)完成开发环境的安装。2、了解PX4包含哪些仿真工具仿真首先分为软件在环仿真(SITL)和硬件在环仿真(HITL)。软件在环仿真一共是有jMAVSim、Gazebo、AirSim这三种。jMAVSi
到底了