




- @pzb19841116
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
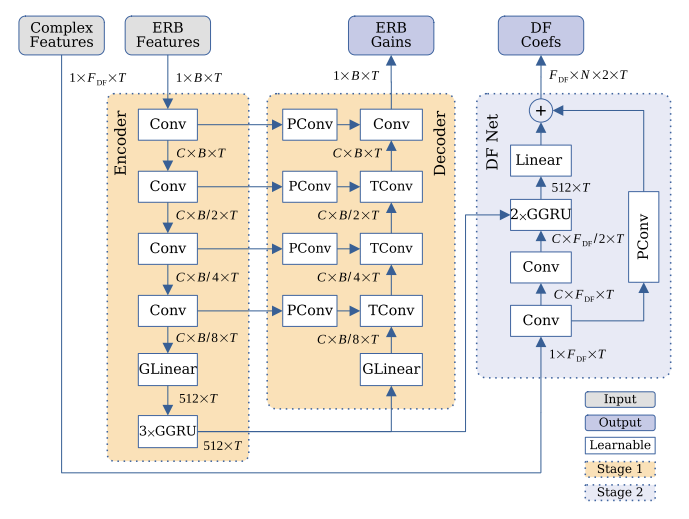
德国学者提出轻量级语音降噪模型DeepFilterNet,采用两阶段深度滤波方法:第一阶段基于ERB增益增强频谱包络,第二阶段通过深度滤波强化语音周期成分。该模型采用可分离卷积等设计降低计算复杂度(仅0.35G MACS),在5-30ms窗口下性能优于传统复掩码方法,WB-PESQ达2.81。实验表明其与先进模型性能相当但计算效率更高,特别适合实时应用。研究验证了深度滤波在低延迟场景的有效性,为资
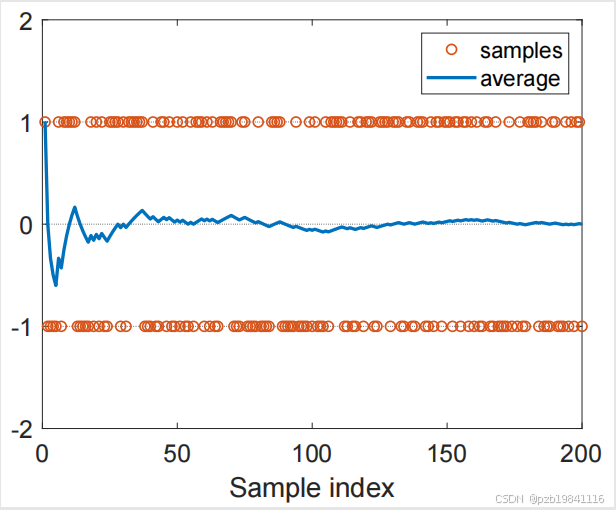
MC Basic算法是基于蒙特卡罗算法的相对最简单的方法,它是基于值迭代法改进的方法,将其中的行为值计算这一步,改用采样的样本进行估计,而不是直接用模型参数计算(因为模型参数可能是未知的)。常用的策略分为两种,一个是确定性的策略,比如贪心策略,每次都选概率最大的。一个是随机性策略,比如软策略。为什么要引入软策略,目的就是一个回合足够的长,那么就会访问到所有的状态-行为对,这样就避免了大量的回合采样
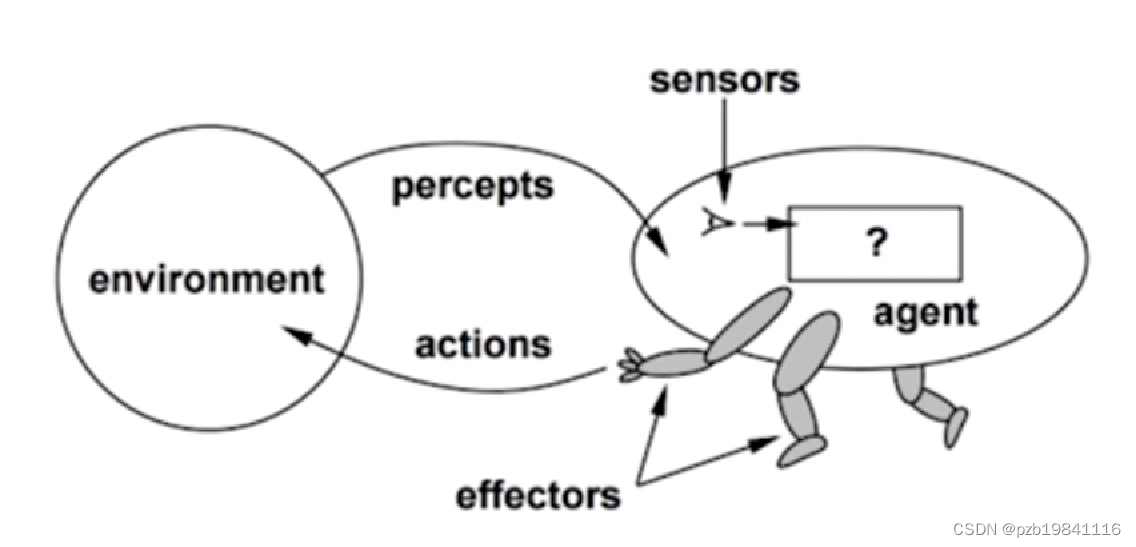
模仿学习: 从专家提供的范例中学习,一般提供人类专家的决策数据, 每个决策包含状态和动作序列, 把状态作为特征,动作作为标记进行分类或回归的学习从而得到最优策略模型。Q-Table为每一个 state 上进行的每一个 action 计算出最大的未来 reward 的期望,每个状态允许四种可能的操作:左移、右移、上移、下移, Table 里的参数式给定最佳策略的状态下采取相应动作获得的最大未来奖励期
所以在做策略迭代的时候,这里要设置一个阈值j,迭代次数大于J的迭代操作予以舍弃,这叫做截断的策略迭代算法(truncated policy iteration algorithm)。策略迭代的初始是一个随机的策略,值迭代的初始是一个随机的状态值。因为采用贪心的思路,这个新的值V_k+1等价于最优的行为值(行为值最大的行为,采用的概率为100%,其余的为0%,就能得到最大值)。第四步的计算是有差异的

第二章是Python基础,笔记省略深度学习中常见的各种层卷积的本质是用卷积核的参数来提取数据的特征,通过矩阵点乘运算来得到结果。激活函数层的作用是为网络引入非线性,提升整个网络的表达能力。Sigmoid函数Sigmoid可以用来做二分类,但计算量较大,且容易出现梯度消失的现象。ReLU函数计算简单速度快。Leaky ReLUctant函数效果没有ReLU好。Softmax函数用于多分类问题。池化层
所以在做策略迭代的时候,这里要设置一个阈值j,迭代次数大于J的迭代操作予以舍弃,这叫做截断的策略迭代算法(truncated policy iteration algorithm)。策略迭代的初始是一个随机的策略,值迭代的初始是一个随机的状态值。因为采用贪心的思路,这个新的值V_k+1等价于最优的行为值(行为值最大的行为,采用的概率为100%,其余的为0%,就能得到最大值)。第四步的计算是有差异的
开头的话最近在做物体检测,遍寻资料,发现这本书写得蛮不错。条理清楚,不是资料的堆砌,一看作者就是这方面的行家,貌似是北航的学霸。强烈推荐大家购买该书,支持作者。第一章 浅谈物体检测与PyTorch非深度学习的基础知识及安装等步骤都没有记录人工智能、机器学习与深度学习之间的关系。人工智能的分类。弱人工智能(Artificial Narrow Intelligence,ANI):擅长某个特定任务的智能
第二章是Python基础,笔记省略深度学习中常见的各种层卷积的本质是用卷积核的参数来提取数据的特征,通过矩阵点乘运算来得到结果。激活函数层的作用是为网络引入非线性,提升整个网络的表达能力。Sigmoid函数Sigmoid可以用来做二分类,但计算量较大,且容易出现梯度消失的现象。ReLU函数计算简单速度快。Leaky ReLUctant函数效果没有ReLU好。Softmax函数用于多分类问题。池化层
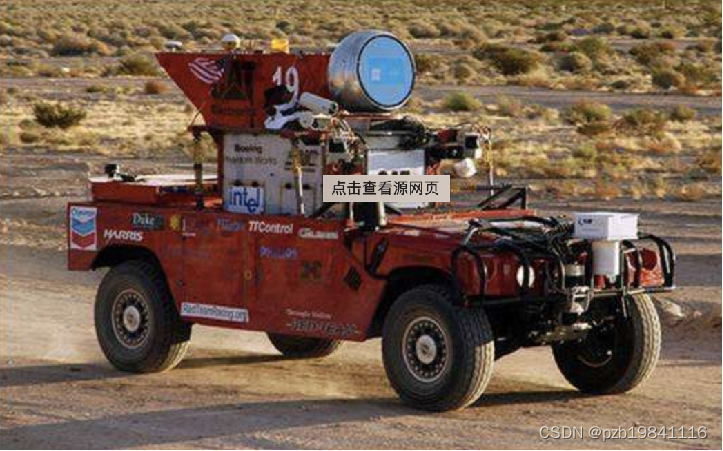
这一部分相当于人的手和脚 传统汽车的这些控制由液压系统和真空助力泵协助完成,自动驾驶汽车的线控需要用电控化的零部件来完成,如电子液压制动系统 林肯MKZ拥有完善的电气化设备和接口。为自动驾驶汽车与人类的责任概念提供具体可衡量的参数,并通过对所有记录在案的交通事故所涉及的行为和环境进行分析统计,为自动驾驶汽车界定了一个可计量的“安全状态”输出:方向盘、油门 实现对无人车的控制,我们需要知道踩刹车和减
开头的话最近在做物体检测,遍寻资料,发现这本书写得蛮不错。条理清楚,不是资料的堆砌,一看作者就是这方面的行家,貌似是北航的学霸。强烈推荐大家购买该书,支持作者。第一章 浅谈物体检测与PyTorch非深度学习的基础知识及安装等步骤都没有记录人工智能、机器学习与深度学习之间的关系。人工智能的分类。弱人工智能(Artificial Narrow Intelligence,ANI):擅长某个特定任务的智能