
写文章




- @okgwf
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
三十二.智能驾驶之多传感器融合技术: MV3D融合方法
智能驾驶之多传感器融合技术: MV3D融合方法
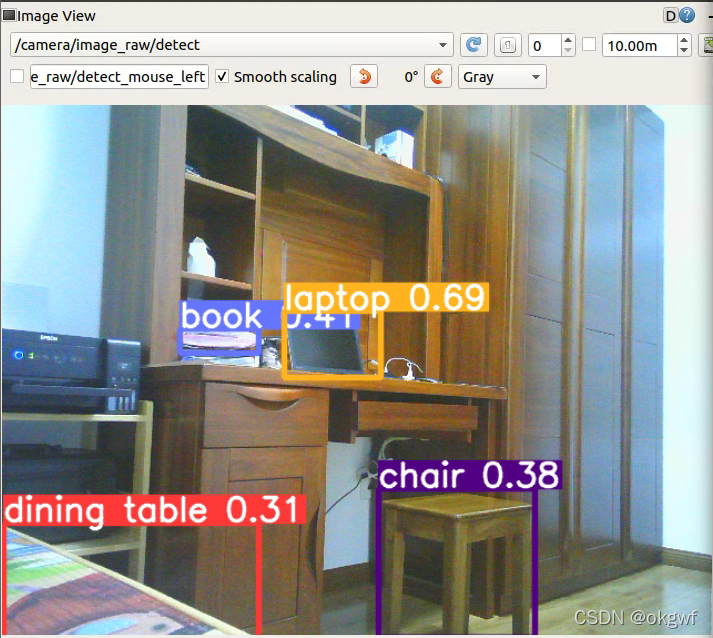
二十. 在ROS系统上实现基于PyTorch YOLO v5的实时物体检测
在ROS系统上实现基于PyTorch YOLO v5的实时物体检测
到底了
该用户还未填写简介
暂无可提供的服务
智能驾驶之多传感器融合技术: MV3D融合方法
在ROS系统上实现基于PyTorch YOLO v5的实时物体检测