- @neptune4751
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
编译ROS包的时候出现错误:fatal error:opencv/cv.h : No such file or directory。

按照博主博客:https://blog.csdn.net/neptune4751/article/details/108936754安装SLAM的运行环境包括Ceres,ROS Kinetic和Ubuntu 16.04等。需要创建catkin_ws工作空间,可在任意目录下创建文件夹catkin_ws:mkdir -p home/zoe/catkin_ws/srccd ~/catkin_ws/src
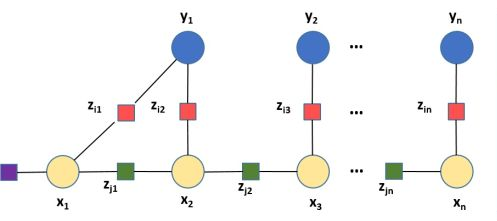
GTSAM (Georgia Tech Smoothing and Mapping library) 是一个开源C++库,用于解决机器人和自动驾驶车辆的定位与地图构建(SLAM)问题。它包含了一系列高效的算法,用于处理传感器数据和地图信息,以估计机器人或车辆的路径和周围环境。GTSAM 通过使用因子图和非线性优化技术,提供了一种灵活而强大的方式来表示和解决SLAM问题。
将项目上传到GitHub并进行项目管理是一个多步骤的过程。

最近在写论文的过程中,遇到多个参考文献在一起,如果手动输入,在打印或者转换成pdf的过程中,总是只剩下一个文献。如[1][2][3][4]想使用[1-4]来交叉引用:1.切换域代码:首先交叉引用第一个和最后一个文献,会出现[1][4]:单击右键,选择“切换域代码”:2.域代码:文献[1] 变为“{REF _Ref80728851 \r \h }”文献[4] 变为“{REF _Ref73698530
在自己的联想YOGA笔记本上成功编译运行ORBSLAM2,并在TUM数据集上验证运行效果,记录安装编译过程。1.安装git、cmakesudo apt-get install git(用于从github上clone项目到本地)sudo apt-get cmake(用于编译项目)sudo apt-get update(用于更新软件列表)2.安装Pangolin用于可视化和用户界面...
这篇论文介绍了一种名为“4DRadarSLAM”的新型4D成像雷达SLAM系统,旨在提高大规模环境下的定位与地图构建性能。与传统的基于激光雷达的SLAM系统相比,该系统在恶劣天气条件下表现更佳。它包括前端、回环检测和后端三个主要部分:前端通过扫描匹配计算里程计数据,回环检测模块识别回环,后端则构建并优化姿态图。该系统的显著特点是考虑了每个点的概率分布,从而改善性能。论文中还展示了在不同平台和数据集

图像中的掩膜(Mask)是什么_bitcarmanlee的博客-CSDN博客_掩膜

latex如何直接转换成word格式
大家有没有什么可以替换的远程控制软件的吗?好像对于海外用户需要付费购买海外会员?