
写文章




- @mrxdj2000
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
【2025】如何在windows上部署Python环境(anaconda,vscode,Pycharm)
在本文档中,介绍如何安装anaconda和Visual Studio Code。
【2025】如何在windows上部署Python环境(anaconda,vscode,Pycharm)
在本文档中,介绍如何安装anaconda和Visual Studio Code。
【AI生成】数据世界的炼金术:那两行不变的黄金
plt.rcParams['font.sans-serif'] = ['SimHei']plt.rcParams['axes.unicode_minus'] = False
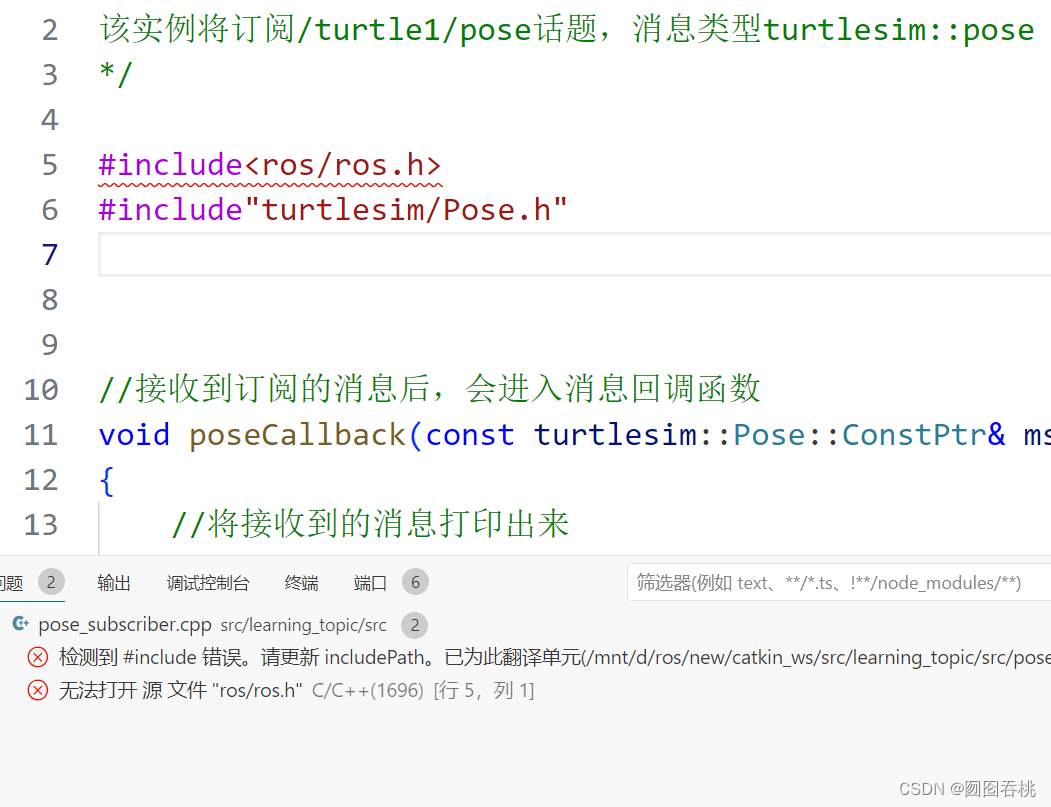
ROS配合VScode使用出现“无法打开源文件ros/ros.h”的问题的解决
把/opt/ros/kinetic/include/后面的**删了,竟然就不报错了,也能够正常使用代码补全了。2.删除自动在工作空间生成的.vscode下的c_cpp_properties.json。最后偶然在前面操作的基础上,再进入c_cpp_properties.json文件。(注意,kinetic目录名因ROS版本而异)1.安装VScode拓展:ROS。3.重新启动VScode。
到底了