- @m0_75114363
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文讲解了项目-stm32f103vet6开发板设计的电源设计部分,主要模块包含typec5v输入、12v输入、buck电路、ldo电路、电流合路、模数地隔离。
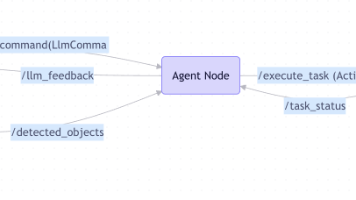
在之前的文章【机械臂】【视觉】二、基于YOLOv8实现物体大致坐标定位-CSDN博客中,我基于YOLOv8实现了相机拍摄物体后的视觉定位。在这一章节中,我将实现Agent模块,其担当的角色为:接受llm模块解析用户指令后的输出,查阅视觉模块的信息,向控制器模块发送控制指令。实现了LLM、Agent、控制器之间的基本通信架构demo,完成了验证,下一步是在当前基础上做优化,丰富系统功能及健壮性。
简单来说,就是要将PCB上的飞线转化为实际的走线网络。本文讲解了项目-stm32f103vet6开发板设计的电源布线部分。
在上一篇文章(【从0到1制作一块STM32开发板】4. 模块化布局-CSDN博客)中,我们进行了模块化布局,即先将每个模块的PCB单挑出来先放一边。本篇文章会讲解如何将这些挑出来的模块合理地摆放在PCB板子上,这便是PCB地整体布局。本文讲解了项目-stm32f103vet6开发板设计的整体部分。
简单来说,单片机最小系统由以下几个部分组成:1. 单片机电路及其排针。2. 晶振电路。3. 复位电路。4. 启动模式选择电路。本文讲解了项目-stm32f103vet6开发板设计的单片机最小系统设计部分,主要模块包含单片机电路及其排针、晶振电路、复位电路、启动模式选择电路。
本文讲解了项目-stm32f103vet6开发板设计的电源设计部分,主要模块包含typec5v输入、12v输入、buck电路、ldo电路、电流合路、模数地隔离。
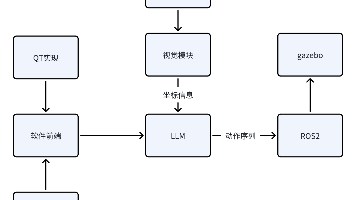
在之前Agent部分的工作中,我成功实现了agent、planner、controller等模块,能够做到向agent发送指定格式的msg后,系统能够正确地执行动作。而在本章中,我将接入LLM,通过提示词工程,将用户输入的自然语言指令解析为符合格式要求的json语句,再通过字符解析构造msg,向agent发送话题信息,之后实现整个链路的操作。完成了LLM模块的设计与实现,整个系统已经能实现用户的自
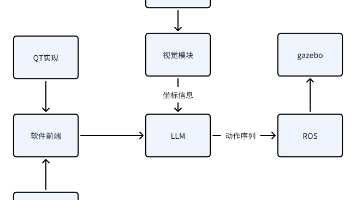
在之前的文章【机械臂】【Agent】一、Agent与其它模块的通信设计-CSDN博客中,我实现了llm、agent、vision、controller模块之间的通信,简单来讲,llm与agent之间由我自己定义的msg进行话题通信,agent与vision之间由我自己定义的msg进行话题通信,agent与controller之间由我自己定义的srv进行服务通信。在这一节中,我将对代码以及通信架构进

在之前的文章【机械臂】【视觉】二、基于YOLOv8实现物体大致坐标定位-CSDN博客中,我基于YOLOv8实现了相机拍摄物体后的视觉定位。在这一章节中,我将实现Agent模块,其担当的角色为:接受llm模块解析用户指令后的输出,查阅视觉模块的信息,向控制器模块发送控制指令。实现了LLM、Agent、控制器之间的基本通信架构demo,完成了验证,下一步是在当前基础上做优化,丰富系统功能及健壮性。
本篇博客为该系列的总览,主要讲述了该项目的大致组成,后续我会持续更新系列内容,充当学习分享,如有谬误,欢迎指正。