




- @m0_68961828
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
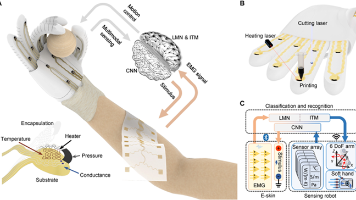
但目前仍面临挑战:现有人工智能方法中,Transformer 耗时且依赖复杂预训练,循环神经网络对局部模式处理较弱,全卷积网络忽略结构特征,而卷积神经网络(CNN)虽能高效捕捉局部特征、低延迟且稳健,却缺乏低成本大规模制造方法和材料识别的多模态传感能力。在医疗领域,该界面集成的软机器人可作为假肢手,帮助残疾人通过触摸识别物体。为此,该研究提出一种印刷式人机界面,融合 e-skin 的表面肌电信号(
但目前仍面临挑战:现有人工智能方法中,Transformer 耗时且依赖复杂预训练,循环神经网络对局部模式处理较弱,全卷积网络忽略结构特征,而卷积神经网络(CNN)虽能高效捕捉局部特征、低延迟且稳健,却缺乏低成本大规模制造方法和材料识别的多模态传感能力。在医疗领域,该界面集成的软机器人可作为假肢手,帮助残疾人通过触摸识别物体。为此,该研究提出一种印刷式人机界面,融合 e-skin 的表面肌电信号(
这项技术能制造出个性化的植入物,满足患者的特定需求。创伤、先天性缺陷和癌症等导致对硬组织替代品的需求日益增长,传统金属植入物存在整合不良等问题,增材制造(AM)为患者特异性植入物的制造提供了新途径,能够制造具有工程化互连多孔结构的复杂形状植入物,以更好地模拟物理、机械、化学和生物特性。当前问题:STL 模型文件大、导入困难、后处理耗时,CAD 软件缺乏直接建模工具,设计模型大且重复数据多,AM 过
PDMS具有光学透明性,在390nm至780nm波长范围内的透射率可达75-92%,折射率为1.4,热导率为0.2-0.27W/m - K,比热容为1.46kJ/kg・K,介电强度为19kV/mm,介电常数为2.3 - 2.8,体积电阻率为2.9x10^14ohm・cm,杨氏模量为360-870kPa,泊松比为0.5,抗拉强度为2.24-6.7MPa,硬度为41-43Shore A,粘度为3.5P

这就和它的化学结构有关啦。在生理条件下它可发生多种反应,且在肿瘤微环境或伤口部位的酸性条件(pH≈6)下,亚胺键水解和复分解反应可用于生物医学应用,如许多生物大分子可与醛修饰的聚合物形成亚胺键,构建生物相容性材料。例如,通过亚胺键形成的自愈合水凝胶可用于伤口闭合,一些水凝胶还可负载抗菌和抗氧化药物,在伤口部位响应释放,促进细胞增殖和伤口愈合。水凝胶是由动态共价键交联的亲水或两亲性聚合物网络,具有自

本研究成功构建了多功能PM-Gel微型机器人,复合水凝胶在染料去除和识别方面效果显著,去除率超过90%,2分钟内吸附率是活性炭的两倍,对阳离子和阴离子染料的检测限极低。在仅2分钟内,水凝胶就能去除约56.9%的R6G和64.3%的MB,是商业AC去除率的两倍,并且在2小时内染料最大去除率可达95%,同时水凝胶不会向溶液中释放碎屑。通过电子显微镜观察,MXene呈现出褶皱的形态,其XRD图谱中39°

参与者在实验中佩戴袖套在右前臂,执行器位于背侧,实验过程中参与者肘部支撑,前臂和袖套在空中自由放置,并用盒子遮挡,同时佩戴主动降噪耳机播放白噪声,实验者通过自定义图形用户界面控制作动模式。与振动刺激相比,这种基于准静态位移的触觉方法在判别触摸方面更成功,例如在类似的前臂执行器定位研究中,振动刺激的准确率通常在35%-55%之间,而我们的方法准确率更高。与振动或音圈电机产生的触觉感觉不同,我们的方法

磁驱动在微型机器人领域具有很大的应用前景,例如,利用磁场驱动水凝胶基微型机器人末端执行器执行精确任务,如靶向、释放和采样等。在这个过程中,凝胶溶液在高压下雾化成微小液滴,然后瞬间离子化,液滴内的材料发生交联或凝胶化反应,形成固体水凝胶微球。同时,增强驱动技术,如对磁控系统进行进一步研究和改进,以提高水凝胶微型机器人的能力,使其在医疗、环境和工业等领域得到更广泛的应用。例如,一种可生物降解的水凝胶基
