
写文章




- @m0_63882017
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
CAN通讯
CAN(Control Area Network,控制器局域网简称CAN或者CAN Bus)。是功能丰富的车用总线标准。有一根CAN-Bus总线,所有的装置可以挂在这条总线上。1.1 物理层一种功能丰富的车用总线标准。设计在于不需要主机的情况下,允许网络上的单片机和设备相互通信。基于消息传递协议。CAN拥有良性的弹性调整功能,可以在现有网络中增加节点,而不用在软、硬键上调整。消息的传递不基于任何的
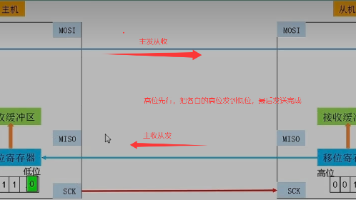
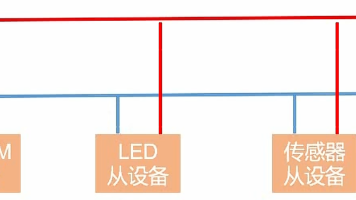
STM32之SPI通信
本文介绍了SPI通信协议及其在STM32上的软件与硬件实现。SPI是一种高速全双工同步串行通信总线,广泛应用于各类外设。
STM32定时器全解析:从基础到高级应用
注意:对于PCS和ARR的值我们要仔细考虑。我们通常将ARR设置为最大值65535。保证CNT不溢出。最好设置PCS为72的倍速,例如将PCS=72,则一个CNT就是1us,而测量的最大周期就是=15.259,相当于最小只能测16Hz的频率。所以此时频率要大于16Hz,不然就会溢出。对于不同频率的信号我们的做法:对于频率较低:1.我们可以增加PCS的值。2.我们可以把CNT溢出的次数给加上。对于频

I2C通信(Inter-Integrated Circuit)
本文主要介绍了I2C总线协议的基础知识、物理层和协议层的相关内容,并通过软件模拟I2C的方式实现了对EEPROM的读写操作。最后,通过主程序演示了如何使用I2C协议进行数据存储和读取。
到底了