
写文章




- @m0_57254760
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
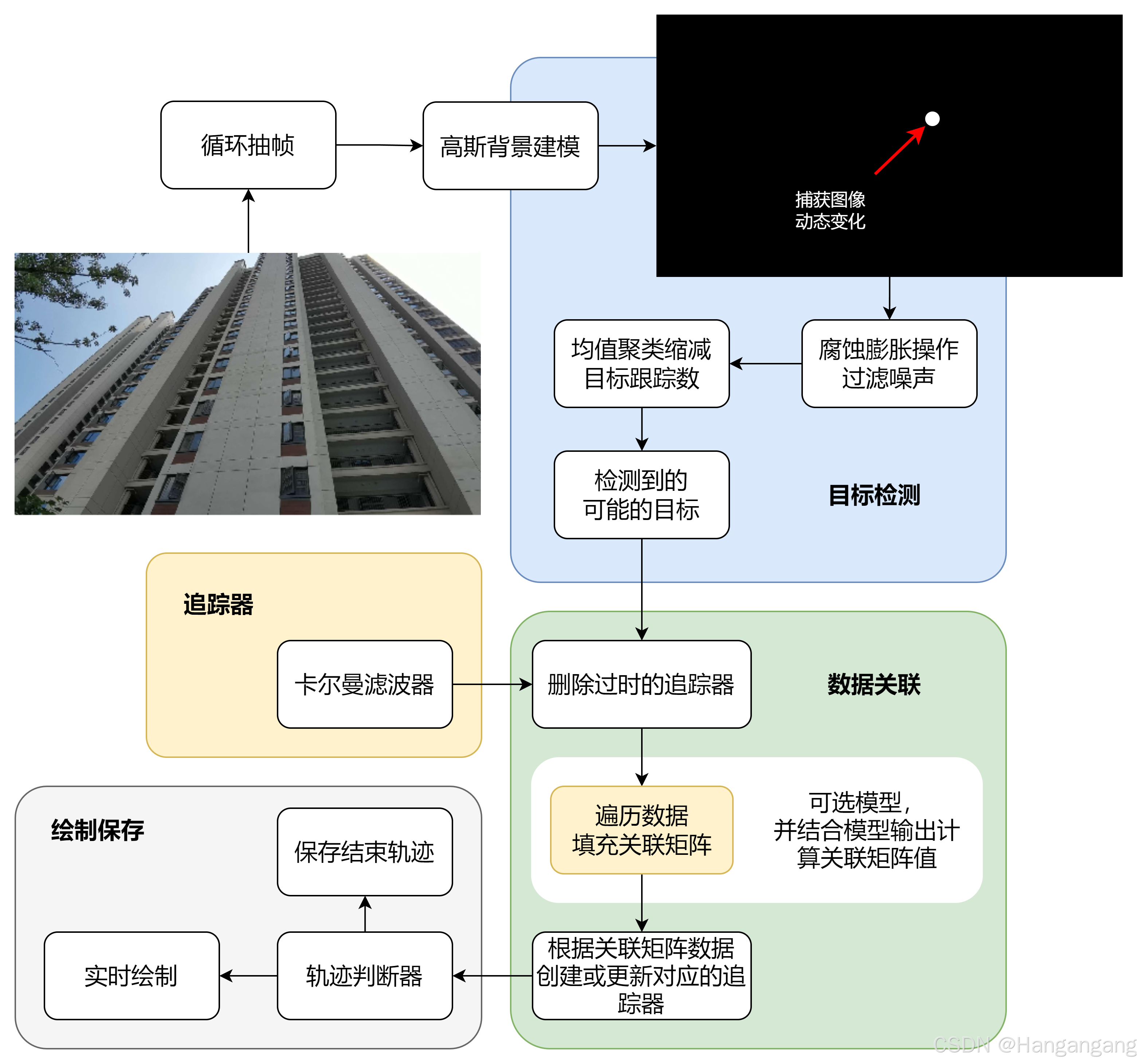
高空抛物轨迹实时追踪(高斯背景建模+卡尔曼追踪器+图片相似度模型)
目标追踪是从上一帧(或之前)追踪目标与当前帧识别出的目标进行匹配,量化来看就是对每个目标和每个追踪进行置信度的计算,实际上就是一个二维的关联矩阵。针对镜头中移动物体过多导致的追踪器溢出,在图像去噪之后又使用了均值聚类算法,这一操作明显过滤了画面大幅扰动带来的性能风险。,实际上由于高空抛物目标的特性这种情况并不产生明显影响,更进一步当前算法没有关注图像本身的信息所以本质上无法完全判断谁会更好,你也可
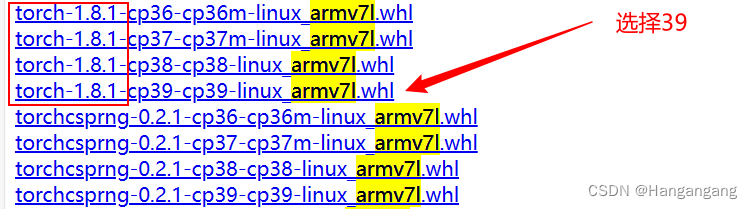
树莓派Python3.9环境安装pytorch与torchvision【附连接】
的条件,这使我的yolov5.v7版本requirement.txt环境不能满足。因为在安装numpy时发现python3.7环境已经不能适配。因此我要安装匹配这个版本的torch否则会显示不支持。版本,由于树莓派特殊的arm架构给安装带来了不便。网址和刚刚安装torch的一样,使用wget下载。选择合适的版本即可,我选择的是3.9.18的。因为我们的python版本为。的版本因为我的依赖要求。
到底了