- @m0_48520385
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
1.问题发现过程中午的时候在笔记本上外接了一个摄像头,想使用这个外接的摄像头的,于是上网搜索如何使用外接摄像头,网友给出的答案是在设备管理器中的照相机菜单下选择系统自带的摄像头(我这里的摄像头的名称是以我的笔记本电脑品牌名命名的)进行禁用操作,然后就可以使用外接的摄像头了,于是我便照这样的方法去做,然而在设备管理器中的照相机菜单下并未发现系统自带的摄像头,只是发现了一个外接的摄像头,名称为XXX(
**ROC的含义及画法**ROC的全名叫做Receiver Operating Characteristic(受试者工作特征曲线 ),又称为感受性曲线(sensitivity curve)。得此名的原因在于曲线上各点反映着相同的感受性,它们都是对同一信号刺激的反应,只不过是在几种不同的判定标准下所得的结果而已。其主要分析工具是一个画在二维平面上的曲线——ROC 曲线。ROC曲线以真正例率TPR为纵
1.问题发现过程中午的时候在笔记本上外接了一个摄像头,想使用这个外接的摄像头的,于是上网搜索如何使用外接摄像头,网友给出的答案是在设备管理器中的照相机菜单下选择系统自带的摄像头(我这里的摄像头的名称是以我的笔记本电脑品牌名命名的)进行禁用操作,然后就可以使用外接的摄像头了,于是我便照这样的方法去做,然而在设备管理器中的照相机菜单下并未发现系统自带的摄像头,只是发现了一个外接的摄像头,名称为XXX(
一.LinearRegression().score方法关于LinearRegression().score(self, X, y, sample_weight=None)方法,官方描述为:Returns the coefficient of determination R^2 of the prediction.The coefficient R^2 is defined as (1 − (u)

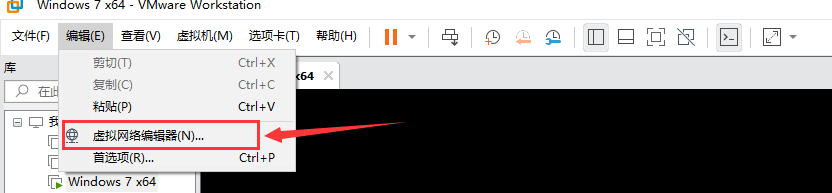
1.打开VMware,选择上方功能栏的“编辑”-“虚拟网络编辑器”2.选择要配置的静态ip所在的虚拟网络适配器VMnet8,取得管理员权利更改设置,将其模式改为NAT模式3.为该虚拟网络适配器配置网关,注意:这里的网关与虚拟机中配置静态ip时要输入的网关是一致的,设置好后点击确定。4.进入到windows虚拟机中,这里以win7系统为例,win10系统同理。配置ip地址、子网掩码、网关、DNS等信