
写文章




- @liu3332456755
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
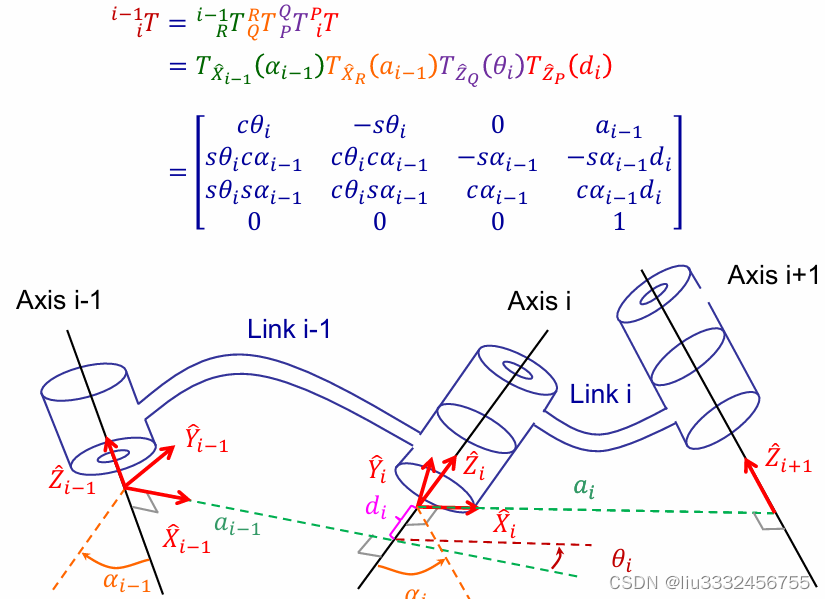
关于机器人DH参数说明
首先,建立Z轴方向,改进的DH建立在杆link i-1的前端,然后往后面建立联系,ai-1与杆link i-1对应,ai-1是直线垂直于Zi-1和Zi 轴的距离,ɑi-1是Zi-1 和Zi 轴的夹角,di是ai-1和ai的X轴的距离,θi是ai-1和ai的X轴的夹角。首先,建立Z轴方向,改进的DH建立在杆link i-1的前端,然后往后面建立联系。
六轴机器人各个关节的名称叫法
六轴工业机器人,更贴切的说法应该是六轴机械手臂,因为它就是模拟我们人类的手臂而研发制造出来的,也主要是代替我们人类手臂能完成一些工作。腕关节3轴是机器人的第六个轴,它连接第五轴和机器人的末端执行器。腕关节1轴是机器人的第四个轴,它连接第三轴和第五轴。基座轴是机器人的第一个轴,它连接机器人的底座和第二轴。第四轴手腕驱动轴,这一轴和我们人体的手腕关节一样,可以让六轴工业机器人实现水平方向上的灵活运动。

关于ROS2面向对象的理解
《动手学ROS2》3.5.3OOP介绍_ros是面向对象还是面向过程-CSDN博客

到底了