- @jinger12
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
软体机器人这些年并不少见,但真正同时做到模块化、无线、闭环控制和可重构应用的工作,其实并不多。很多系统要么依赖外部气源或线缆,要么单模块自由度有限,要么能变形却不容易精确控制。
轮式移动机器人最常见的任务之一,就是轨迹跟踪。问题在于,真实场景里的机器人几乎不可能只面对理想模型:轮胎打滑、侧偏、地面不平、无线测量噪声、执行器扰动,都会把闭环性能一点点拉坏。论文正是从这个问题切入,提出了一种观测器+ 比例-延迟控制器的组合方案,用于四轮 Ackermann 型轮式移动机器人轨迹跟踪。
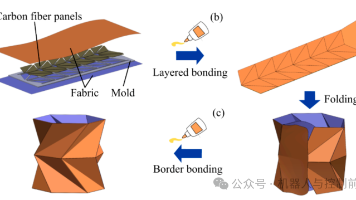
作者基于POZA搭建了四款机器人原型:软体机械臂(可旋转63°~80°,负载500g)、软体夹爪(抓取范围1cm~32cm,抓取力2.2N)、爬行机器人(可爬行、翻滚、钻缝、爬楼梯、攀爬垂直管道)、游泳机器人(可变宽度、前进/后退/转弯,最高速度7.32 cm/s)。它由一个折纸驱动器(正压驱动,实现展开和弯曲)和一个锯齿驱动器(负压驱动,实现折叠和收缩)组成。图5a 是实验装置。通过折纸(提供展
移动机器人在复杂动态环境中运动规划,既要快又要稳,还要安全。现有方法各有短板:MPC依赖精确模型,在线优化计算量大;RL数据效率低,训练好了也未必能应对未知障碍。
移动机器人在复杂动态环境中运动规划,既要快又要稳,还要安全。现有方法各有短板:MPC依赖精确模型,在线优化计算量大;RL数据效率低,训练好了也未必能应对未知障碍。
论文信息英文题目:Reversible kink instability drives ultrafast jumping in nematodes and soft robots中文题目: 可逆扭结不稳定性驱动线虫与软体机器人的超高速跳跃作者:Sunny Kumar, Ishant Tiwari, Victor M. Ortega-Jimenez, Adler R. Dillman, Dongj
如果只用一句话概括这篇论文,我会说:它把折纸机器人从“能演示”往“能设计”推了一步。这一步听起来不如“新结构”“新材料”“新视频”那么抓眼,但对真正做研究的人来说,反而更重要。因为机器人最后能不能从概念样机变成可预测、可优化、可复现的系统,靠的不是某一次跑得漂亮,而是有没有一套足够可信的动力学描述。论文作者在这一点上做得很认真:面板惯性不再糊弄,折痕参数不再靠猜,摩擦接触不再预设,气动驱动也被纳入