




- @hs977986979
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
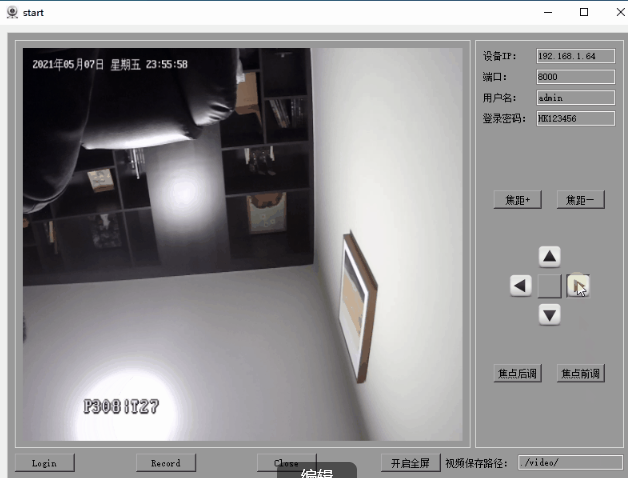
最近用Qt做了一个基于海康威视网络摄像头SDK的二次开发,效果还不错。文章最后将开发的资料和demo软件通过链接方式分享,有兴趣的可以看下效果。开发情况介绍:qt版本:Qt5.14.2海康SDK版本:SDK_Win64测试摄像机型号:DS-2DC2402IW-DE3软件功能:1:可以控制摄像机左右旋转,上下俯仰运动。2:支持镜头焦距控制,和焦点调节。...
阻抗(Z)是用于描述电路中对交流电源的阻碍程度的物理量,其计算公式因电路中的不同元件而有所差异。以上公式是阻抗计算的基础,适用于大多数电路分析。在实际应用中,还需要根据具体的电路布局和元件参数进行详细的计算和分析。
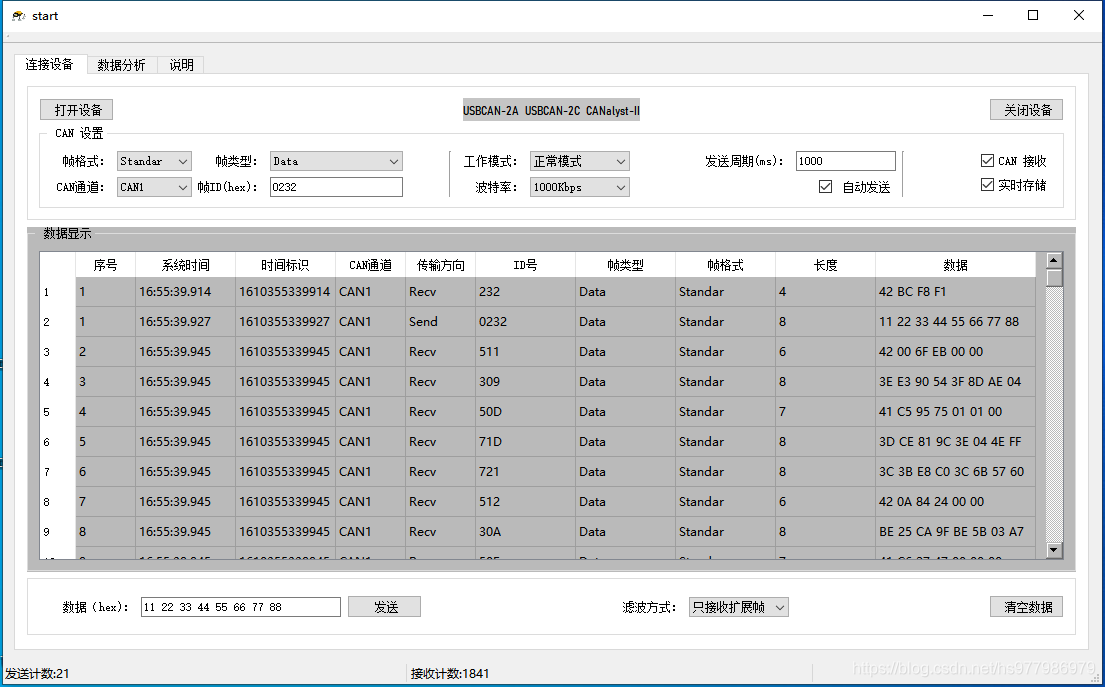
最近用qt做了一个USBCAN二次开发的上位机软件。经过本人实际测试,效果不错,界面和官方的软件类似。做此软件的目的主要是学会调用该模块的二次开发库,采集数据时也就可以将数据进行简单的处理,这样调试起来也就方便很多了。界面如下:此软件和官方的软件界面类似,用起来也基本相同。官方软件如下图:该软件支持三款USBCAN模块:USBCAN-2A ,USB_CAN-2C , CANalyst-II细节方面
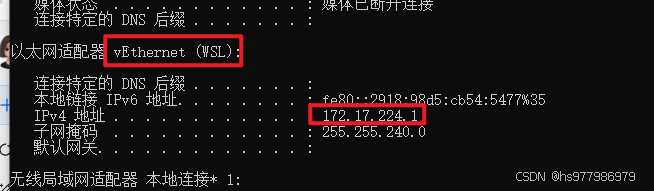
1、windows主机查看vEthernet(WSL)的ip地址。
阻抗(Z)是用于描述电路中对交流电源的阻碍程度的物理量,其计算公式因电路中的不同元件而有所差异。以上公式是阻抗计算的基础,适用于大多数电路分析。在实际应用中,还需要根据具体的电路布局和元件参数进行详细的计算和分析。
最近研究了一下UR5机械臂的控制,由于供应商提供的实物是用自带的示教器来编程控制,感觉很不方便。于是我研究了一下UR5机械臂的资料,决定用Qt写个控制软件,将示教器上面的控制界面移植过来,这样就可以用电脑通过无线网络远程控制机械臂了,下面介绍本人做的控制软件。此图是示教器屏幕上的控制界面此图为本人用Qt写的UR5机械臂控制软件从上面两图对比中可以看出,我写的控制软件进行了功能扩展,示教器.....

(机器人学的核心问题是做好和物理世界的交互。现在主流的机器人学分支里,处理与物理世界的交互的学科分为三类:传感器和处理算法;多刚体系统动力学控制;机器人自主移动。)