- @hoopertsau
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
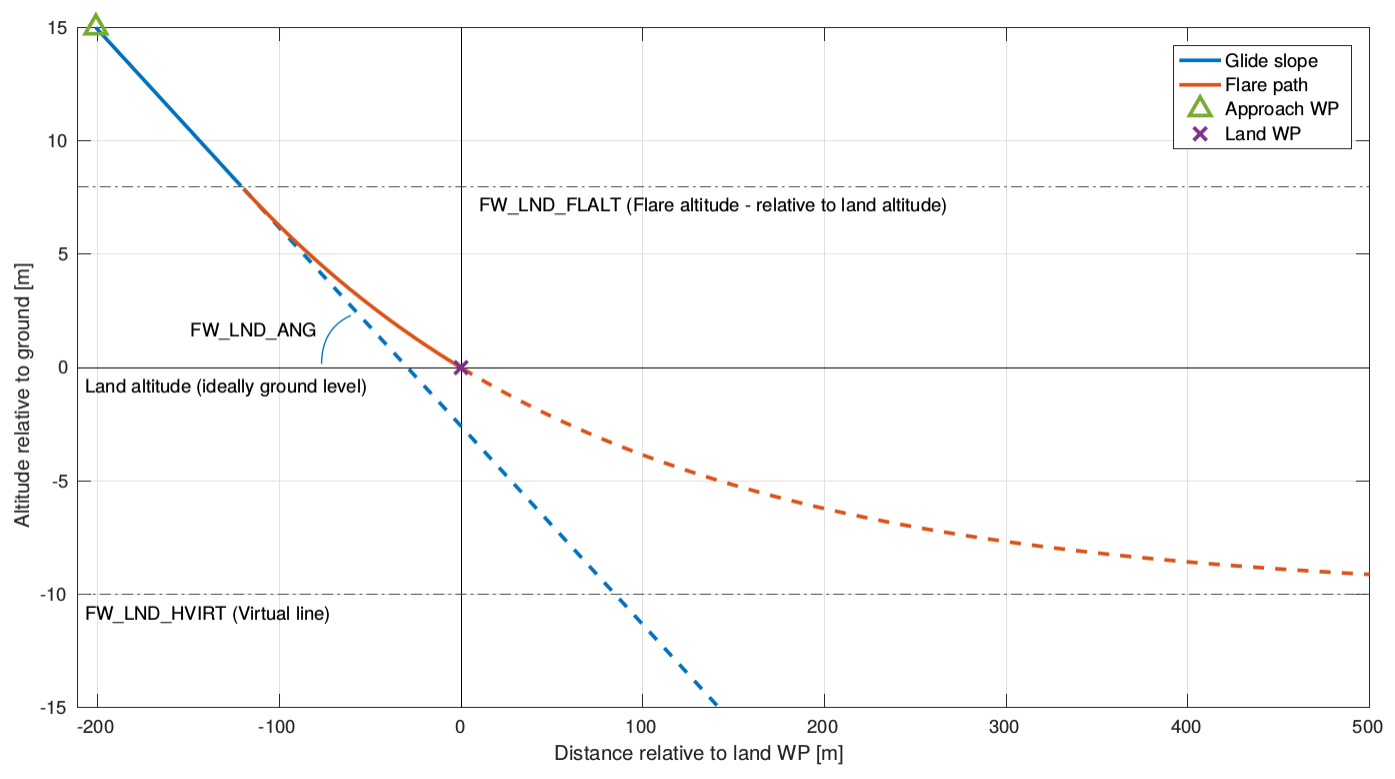
飞行的高度是如何测量的?地面的高度和海平面的高度差别很大,飞控又是如何有效判别进行降落的?这是我脑子里的疑问。搜索的一圈发现很少有人讨论这方面的问题,于是本次我就直接看一下源代码,一起分析一下PX4中关于高度的相关问题,以及如何利用高度实现自动降落的。注:看文档最好还是看英文的,有时候翻译的没有把关键信息给翻译出来,会有很多误解。1、PX4降落的几种模式Fixed Wing:Manual-Easy
OrangePi i96 rtl8812au wifi驱动移植 gstreamer读取摄像头
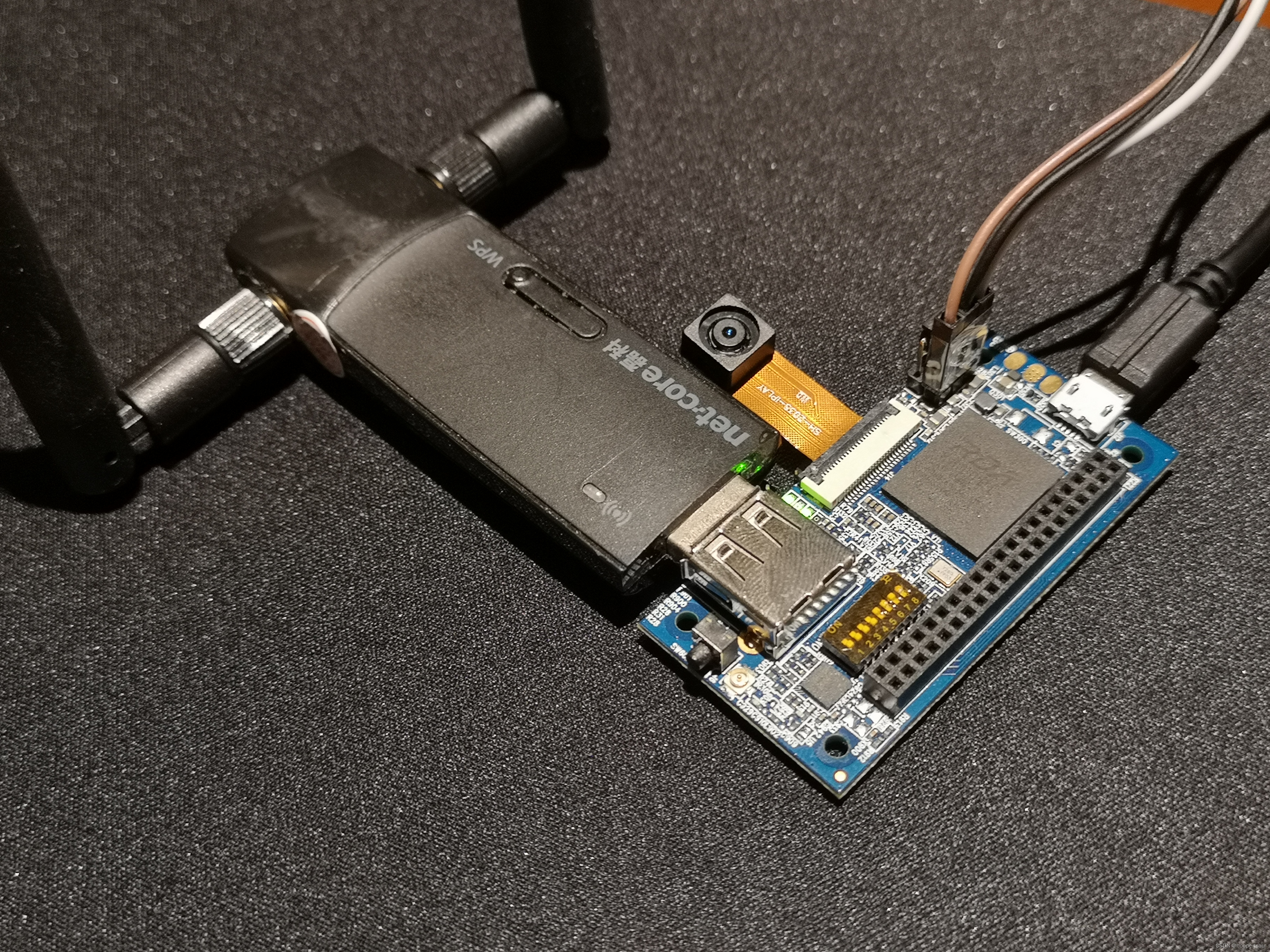
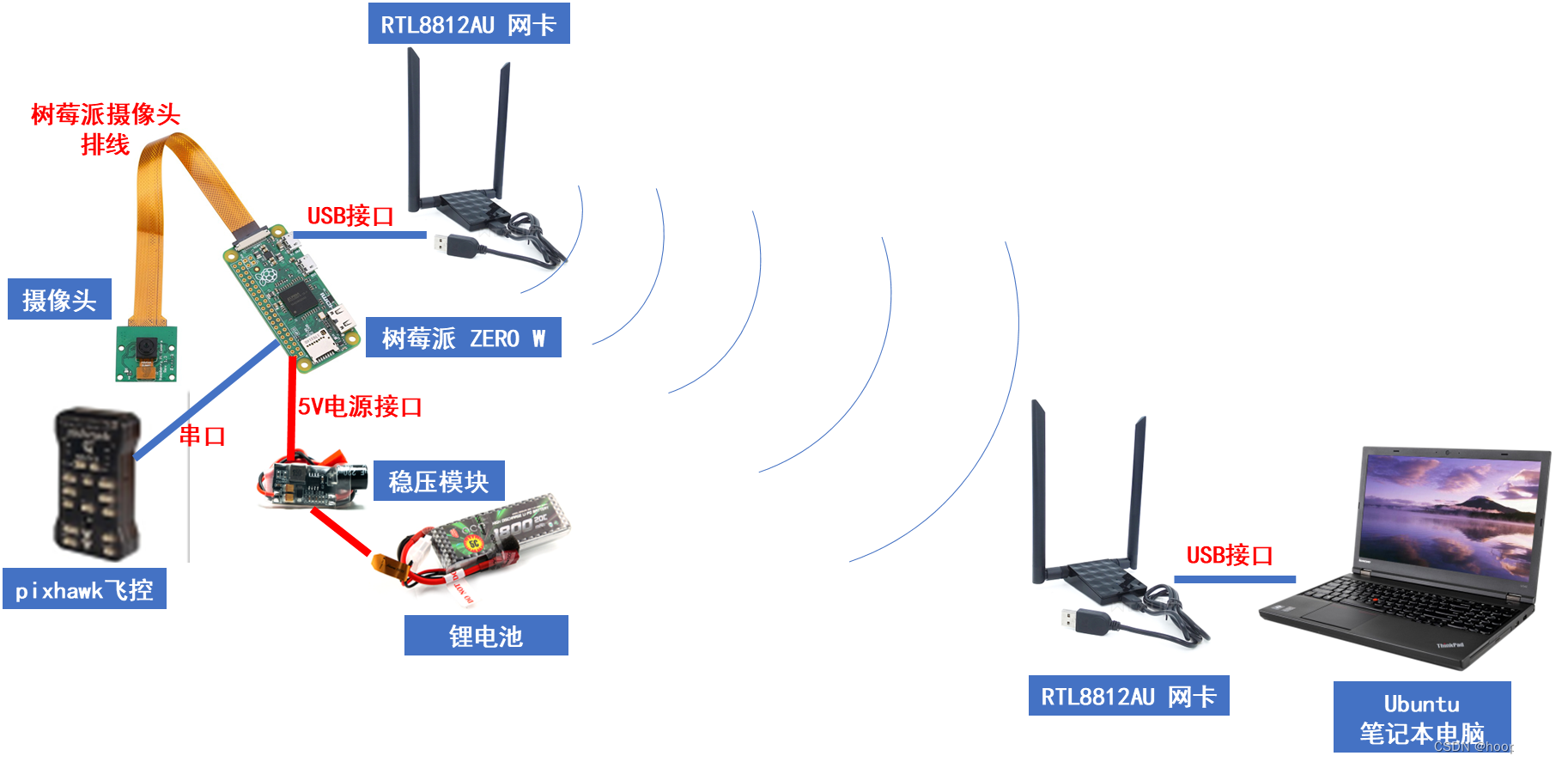
方案本身并不复杂,都是采用成熟的产品,只需要几个命令行就能解决问题0、准备工作硬件:树莓派zero4G网卡linux台式机/笔记本/虚拟机软件:raspividnetcat / ncmplayerZeroTier1、树莓派+4G网卡实现连接互联网首先:树莓派通过4G网卡先要连接互联网,这一步详见之前写的另一篇文章https://blog.csdn.net/hoopertsau/article/de
方案本身并不复杂,都是采用成熟的产品,只需要几个命令行就能解决问题0、准备工作硬件:树莓派zero4G网卡linux台式机/笔记本/虚拟机软件:raspividnetcat / ncmplayerZeroTier1、树莓派+4G网卡实现连接互联网首先:树莓派通过4G网卡先要连接互联网,这一步详见之前写的另一篇文章https://blog.csdn.net/hoopertsau/article/de
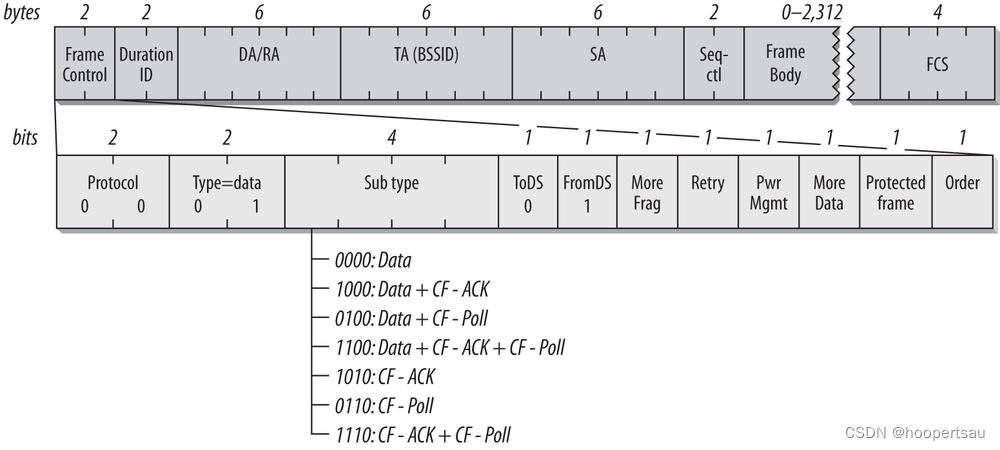
核心原理就是:在发送方采用Inject模式,以广播的方式直接发送802.11数据帧,在数据帧中包括了我们需要传输的数据;在接收方,使用monitor模式,接收数据帧并提取出其中的数据。
OpenHD改造实现廉价高清数字图传(树莓派zero + ubuntu PC )——(一)概述