- @hookie1990
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文基于 Apollo-Vision-Net 工程,实现了一个多任务 BEVFormer 模型,同时完成 3D 目标检测和占据栅格预测(OCC)。模型采用共享 BEV 表示的设计,检测分支使用 DETR 风格的 decoder 进行 query-based 预测,而 OCC 分支直接将 BEV token 上采样为体素网格。配置文件中定义了 BEV 尺寸(50×50)、时序长度(queue_len
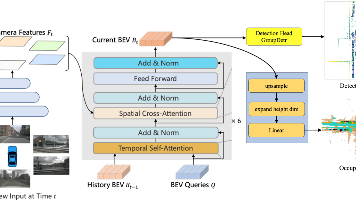
本文梳理基于 BEVFormer 的检测与语义分割多任务实现,复现并验证 BEV 表示经 reshape、rot/flip、feat_cropper(grid_sample) 到 SegEncode 的张量流与空间对齐。文章包含关键配置摘录、轻量化单元测试与输出样例,提出可加入的 CI 断言(批次与空间尺寸对齐)和可视化诊断步骤(对比 seg_pred.argmax 与 rasterized se
地平线OE3.7版本上线了一个J6M可跑的多任务感知模型,其qat后det任务mAP高达41,比OE3.2各类3D目标检测模型高近10个点,并且支持目标检测(推测为Sparse4D系列)、实时地图生成(MapTR)、Occ占据栅格预测(FlashOcc)三个任务并行,并且在J6M上FPS跑到了35,虽然测试的是在数据集上,但该模型已经十分接近量产,非常值得研究,因此本文从配置出发,对该多任务模型进
资料来源于https://www.codeproject.com/Articles/576228/Line-Fitting-in-Images-Using-Orthogonal-Linear-Reg先行Mark,并附python代码。另如下https://blog.csdn.net/linxue968/article/details/19913661中提供的方法存在问题,已测试(r*v-...
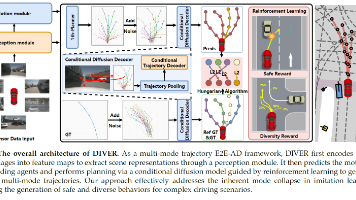
本文深入解读了自动驾驶前沿框架 DIVER,它通过融合 扩散模型 与 强化学习,解决了端到端自动驾驶中因模仿学习导致的 行为保守 与 轨迹模式崩溃 难题。文章剖析了其核心组件 PADG(策略感知扩散生成器) 与 GRPO(群组相对策略优化) 的工作原理,并结合开源代码结构说明实现细节。实验表明,DIVER 在 NAVSIM、Bench2Drive 等主流仿真与真实数据集上,在 轨迹多样性、安全性与
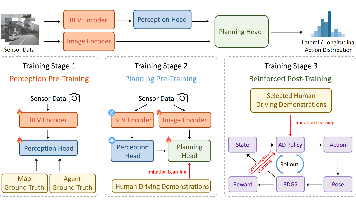
本文围绕 RAD-2 论文与官方代码仓库,系统解析了一条面向闭环自动驾驶规划的生成器-判别器强化学习路线。文章重点说明 RAD-2 如何用扩散生成器负责多模态候选生成、用 RL 判别器负责闭环重排,并结合 TC-GRPO、OGO 与 BEV-Warp 提升训练稳定性与交互质量。同时,博客还把 action anchor、planning head、advantage 计算等开源代码模块与论文方法对
本文梳理基于 BEVFormer 的检测与语义分割多任务实现,复现并验证 BEV 表示经 reshape、rot/flip、feat_cropper(grid_sample) 到 SegEncode 的张量流与空间对齐。文章包含关键配置摘录、轻量化单元测试与输出样例,提出可加入的 CI 断言(批次与空间尺寸对齐)和可视化诊断步骤(对比 seg_pred.argmax 与 rasterized se
SparseDriveV2 提出因子化词表与分层打分框架:先将轨迹拆成几何路径和速度剖面,再用 K-Means 构建超密候选集,并通过 coarse-to-fine 机制逐级筛选与重评分,在更低计算开销下扩大动作空间覆盖。实验上,模型在 NAVSIM v1 取得 92.0 PDMS、NAVSIM v2 取得 90.1 EPDMS,在 Bench2Drive 达到 89.15 Driving Sco
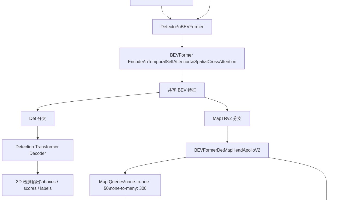
本文围绕 **det(3D 检测)** 与 **map(MapTR 实时地图生成)** 两个感知任务并行模型设计,系统梳理 Apollo-Vision-Net 中 det+map 多任务模型的“设计 → 配置 → 源码实现 → 评测闭环 → 复现结果”。目标是让读者能够对照文档完成模型复现、测试,并明确每个 cfg 字段对应的源码位置、推理输出的接口规范与设计理由。
本文介绍了在 Apollo-Vision-Net 项目中引入 MapTRv2 机制的技术方案。文章重点阐述了 MapTRv2 在现有 BEVFormer det+map 基线中的实现方式,包括配置层变化、模块组织和核心机制。