




- @holle_world_ldx
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
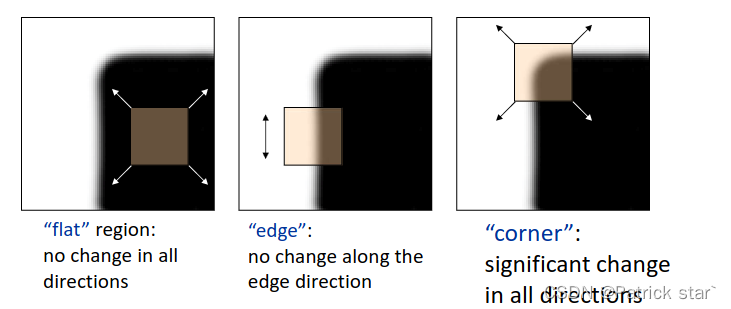
角点指的是窗口延任意方向移动,都有很大变化量的点。用数学公式表示为:E(u,v)反映的移动后窗口的差异,w(x,y)为每个像素的点权值,I(x+u,y+v)是移动的像素值,I(x,y)是移动前的像素值。将E(u,v)进行泰勒展开,直接建立E(u,v)和u,v的联系最终:M称为二阶矩矩阵(second moment matrix)若互补影响:假设只有在u方向上变化是E才会变,因此只有都不为0时(x,
角点指的是窗口延任意方向移动,都有很大变化量的点。用数学公式表示为:E(u,v)反映的移动后窗口的差异,w(x,y)为每个像素的点权值,I(x+u,y+v)是移动的像素值,I(x,y)是移动前的像素值。将E(u,v)进行泰勒展开,直接建立E(u,v)和u,v的联系最终:M称为二阶矩矩阵(second moment matrix)若互补影响:假设只有在u方向上变化是E才会变,因此只有都不为0时(x,
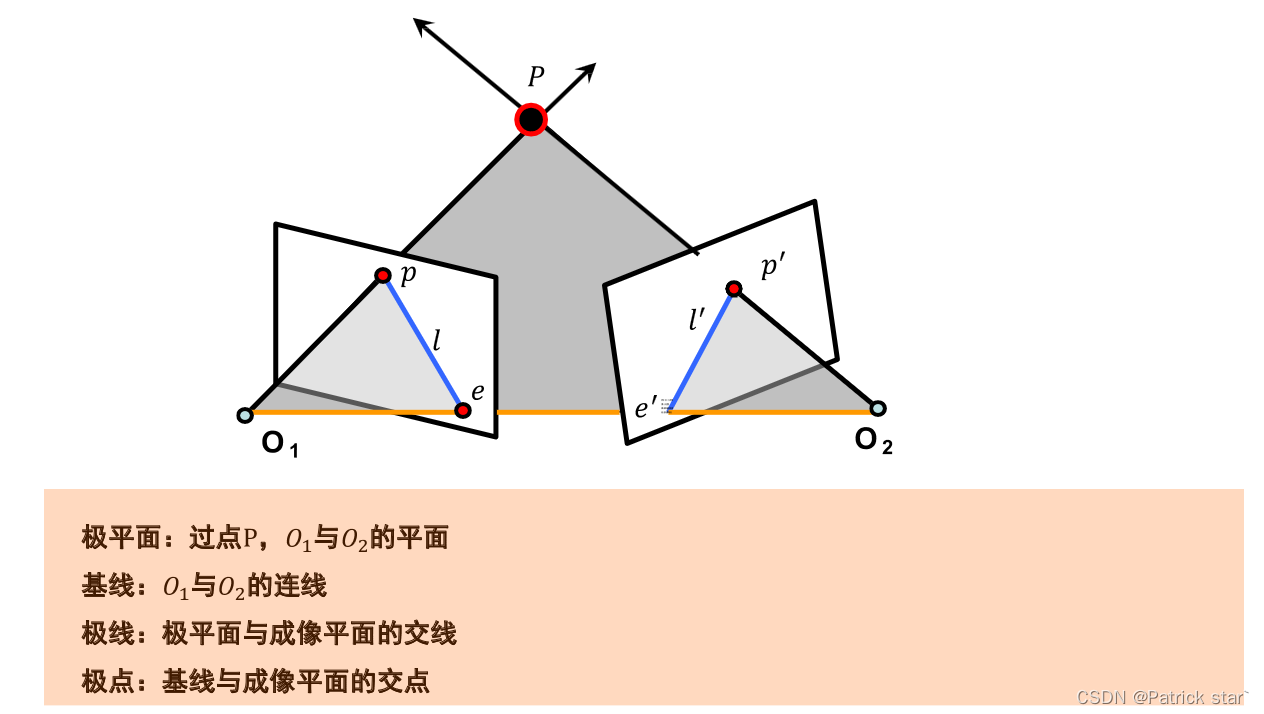
所有的极线都经过极点(e/e'),如果极点位于无穷远处,那所有的极线都平行。通过极几何可以求得极线,现在我们需要将左边的图变成右边的平行视图。平行视图中,可以利用视差就得深度,视差越小深度越深。如何得到平行视图呢?
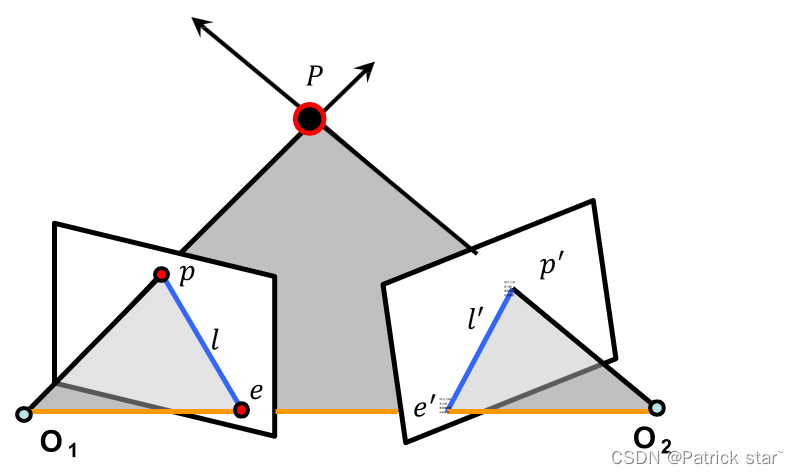
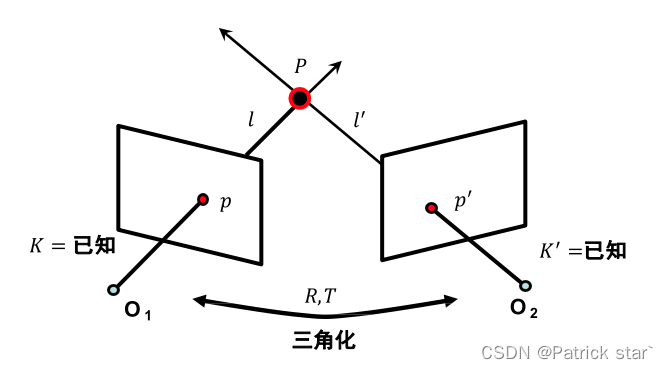
可以发现P在左右相机的投影点一定在各自的极线上,如果求出极线就能缩小求解对应点的范围。基础矩阵对一般的透视摄像机的两个视点的图像间的极几何关系进行代数描述。本质矩阵对规范化摄像机拍摄的两个视点图像间的极几何关系进行代数描述。如果采集到的对应点在同一平面,两个视点间的对应关系用单应性矩阵表示。极几何描述了同一场景或者物体的两个视点图像间的几何关系。E就是本质矩阵,描述了规范化摄像机下两个视点的关系。
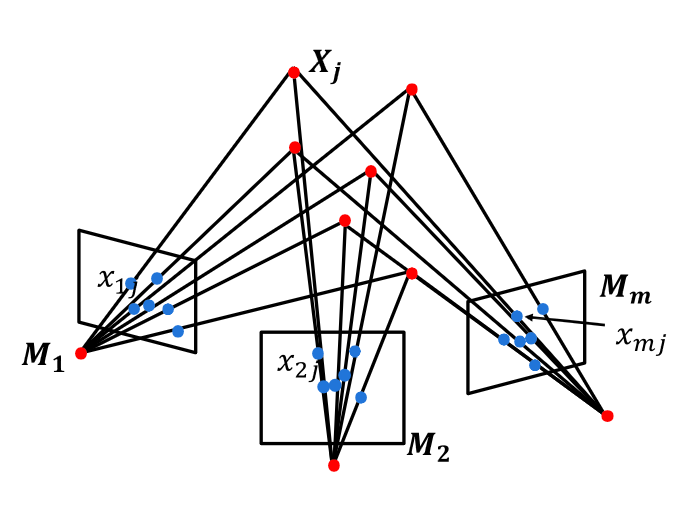
运动恢复结构是通过三维场景的多张图像,恢复出该场景的三维结构信息以及每张图片对应的摄像机参数。
本篇文章介绍一种稠密点云的获取方式——条纹结构光三维重建算法。在学习此算法前,我们需要对基于视觉的三维重建算法有一定了解。需要了解什么是相机模型、相机标定以及三角化的相关知识。当我们得到两个相机的内参、外参后,就能通过两个视图的匹配点计算出该点的三维坐标。但是一般的特征匹配算法(SIFT、SURF)只能提取特征点,并且只有正确匹配才能得到正确的三维坐标。因为两个视图上能够成功匹配的点比较少, 因此
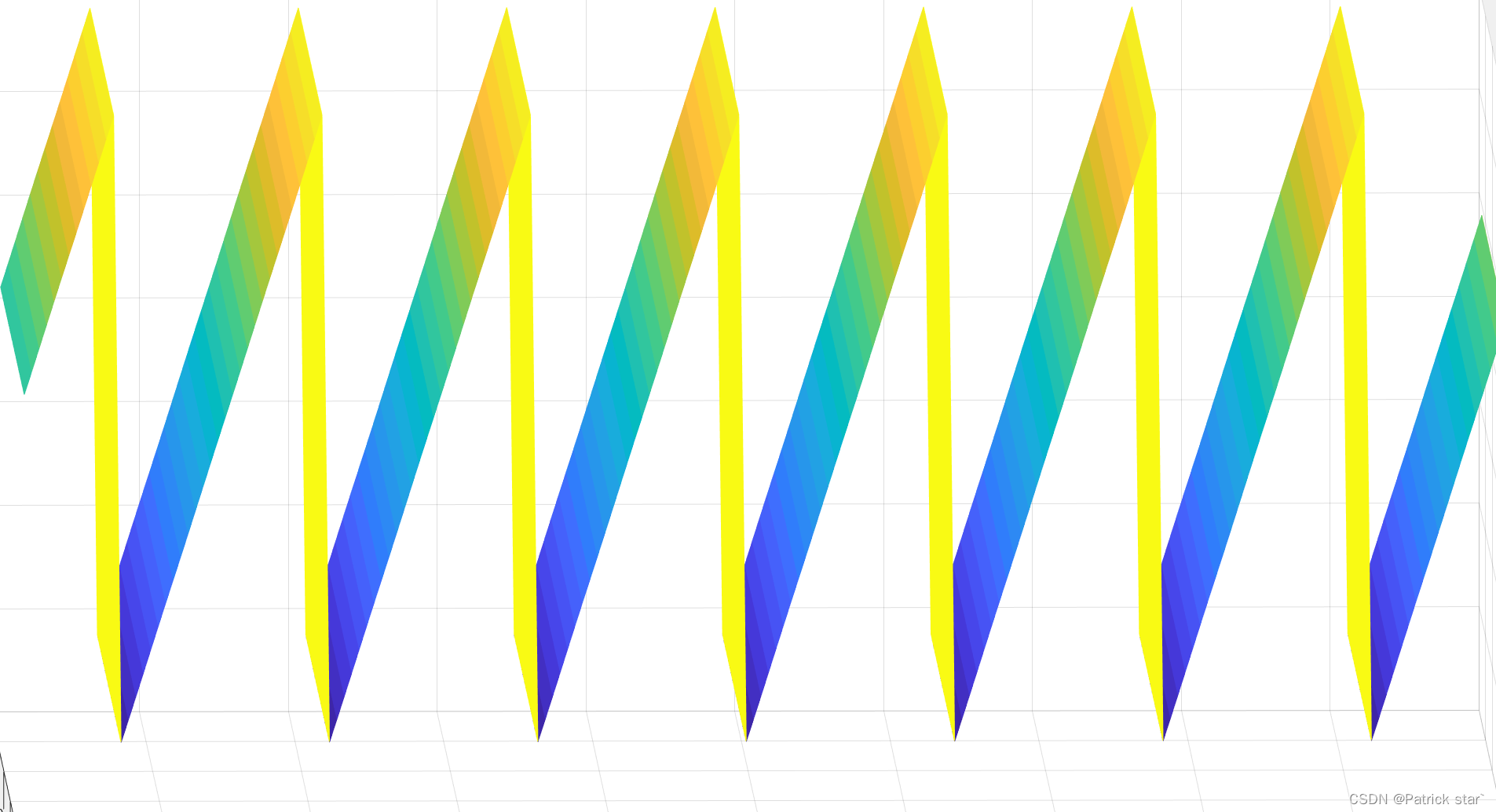
在结构光三维重建中,通过相移法求解出来的相位是包裹相位(在 [-π/2,π/2] 间成周期性 )我们想要用相位找到相机与投影仪间的对应像素,就需要进行相位展开,确保每一行的相位值是唯一的。多频外差的原理是将两种不同频率的相位函数叠加得到一个频率更低的相位函数,设。多频外差是相位展开的一种,接下来我们会介绍它的原理,以及代码。最后就可以求出绝对相位。
顺序表和链表的优缺点
角点指的是窗口延任意方向移动,都有很大变化量的点。用数学公式表示为:E(u,v)反映的移动后窗口的差异,w(x,y)为每个像素的点权值,I(x+u,y+v)是移动的像素值,I(x,y)是移动前的像素值。将E(u,v)进行泰勒展开,直接建立E(u,v)和u,v的联系最终:M称为二阶矩矩阵(second moment matrix)若互补影响:假设只有在u方向上变化是E才会变,因此只有都不为0时(x,
角点指的是窗口延任意方向移动,都有很大变化量的点。用数学公式表示为:E(u,v)反映的移动后窗口的差异,w(x,y)为每个像素的点权值,I(x+u,y+v)是移动的像素值,I(x,y)是移动前的像素值。将E(u,v)进行泰勒展开,直接建立E(u,v)和u,v的联系最终:M称为二阶矩矩阵(second moment matrix)若互补影响:假设只有在u方向上变化是E才会变,因此只有都不为0时(x,