- @eniETIUz
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
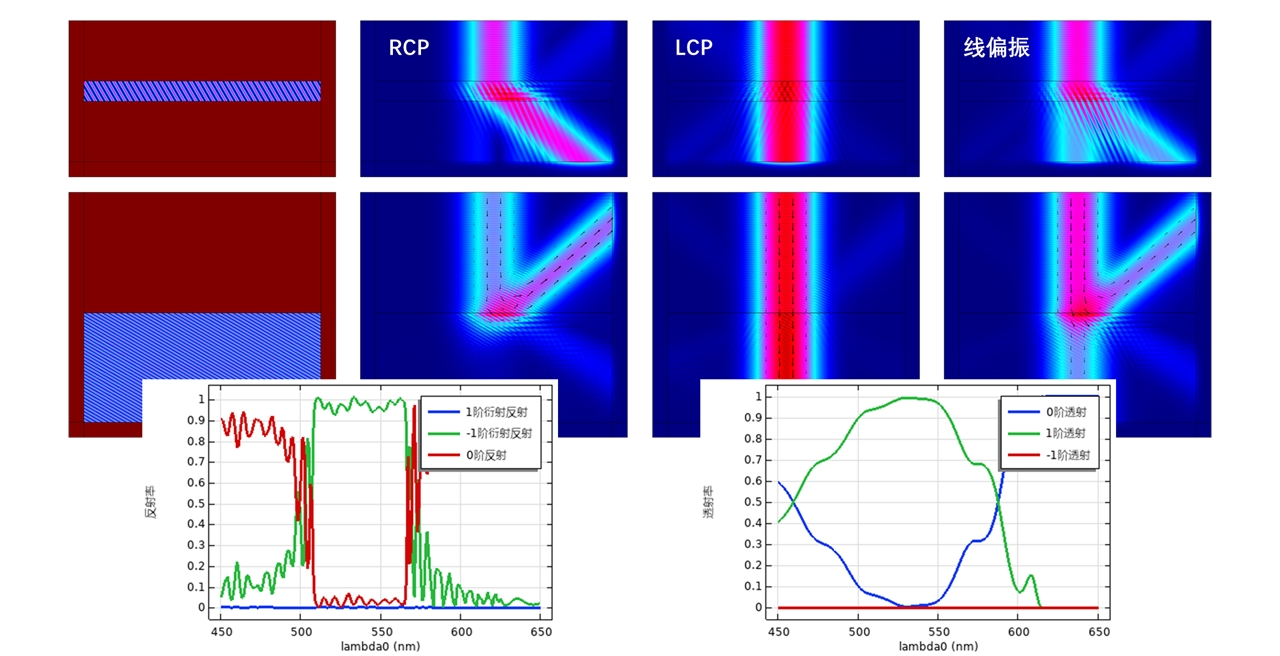
先瞅瞅胆甾相液晶的周期性结构,螺旋轴方向上的周期长度P是关键参数。假设入射光波长是λ,当满足布拉格条件2P·sinθ = mλ时(θ是入射角,m是衍射级次),衍射效率直接拉满。实际测试时会发现,当delta_n超过0.2后,效率提升开始边际递减,这就是液晶材料选择的平衡点。液晶光栅PVG(偏振体积光栅)这玩意儿在AR眼镜和全息显示里特别火,尤其胆甾相液晶那个螺旋结构,能把光的偏振玩出花来。实际跑仿
这里有个坑要注意:S7-1200/1500在博途环境需要先启用"允许来自远程对象的PUT/GET通信"。欢迎PLC老司机们来提PR,或者分享你们在设备通信中遇到的奇葩问题——上周刚解决个1500PLC的TSAP地址冲突问题,这酸爽...支持S7-200Smart,S7-300,S7-400CPU通讯。支持S7-200Smart,S7-300,S7-400CPU通讯。支持博途S7-1200,S7-1

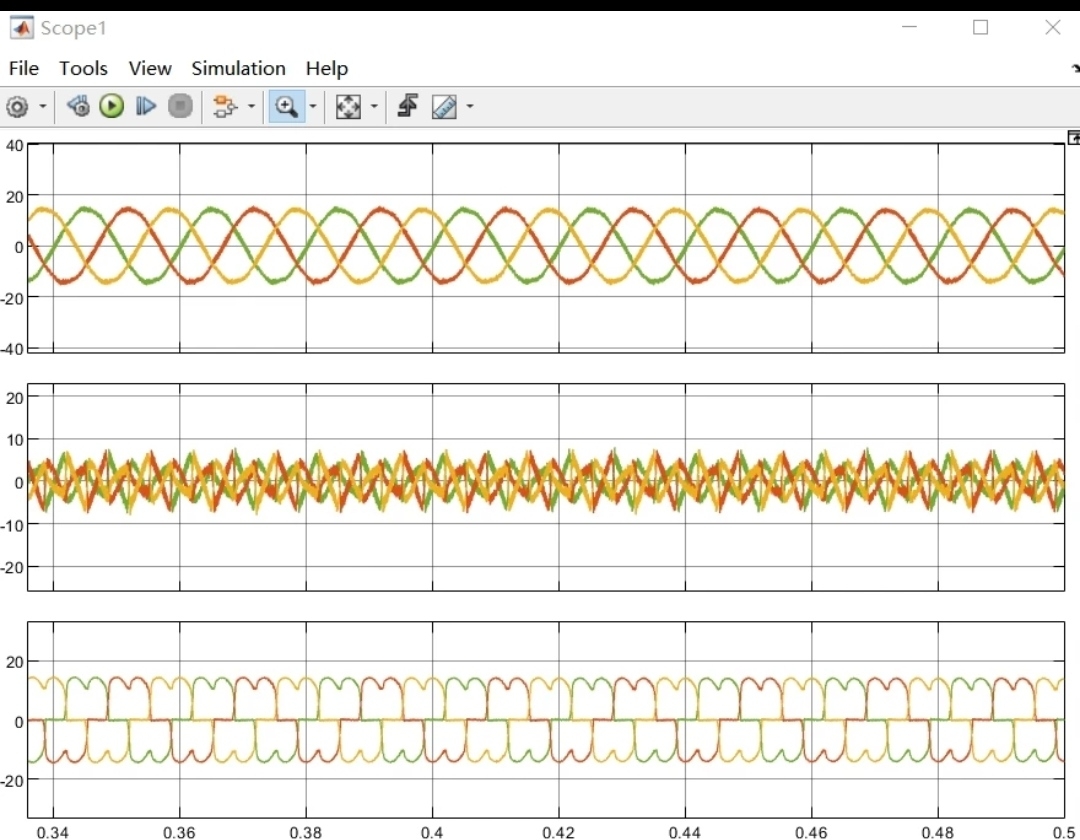
最近在搞三相有源电力滤波器(APF)的仿真,发现这货简直就是电网里的Tony老师——专治各种电流造型不服。咱们先看实测效果:电网电流(修完的造型)、APF输出电流(Tony老师的手艺)、整流性负载电流(原始杀马特造型)。跑出来的效果绝对是强迫症福利:最上面的电网电流规规矩矩的正弦波,中间的APF电流张牙舞爪专门怼谐波,最下面的负载电流依旧保持杀马特本色。这时候APF就得出手了,它的核心技能是:实时
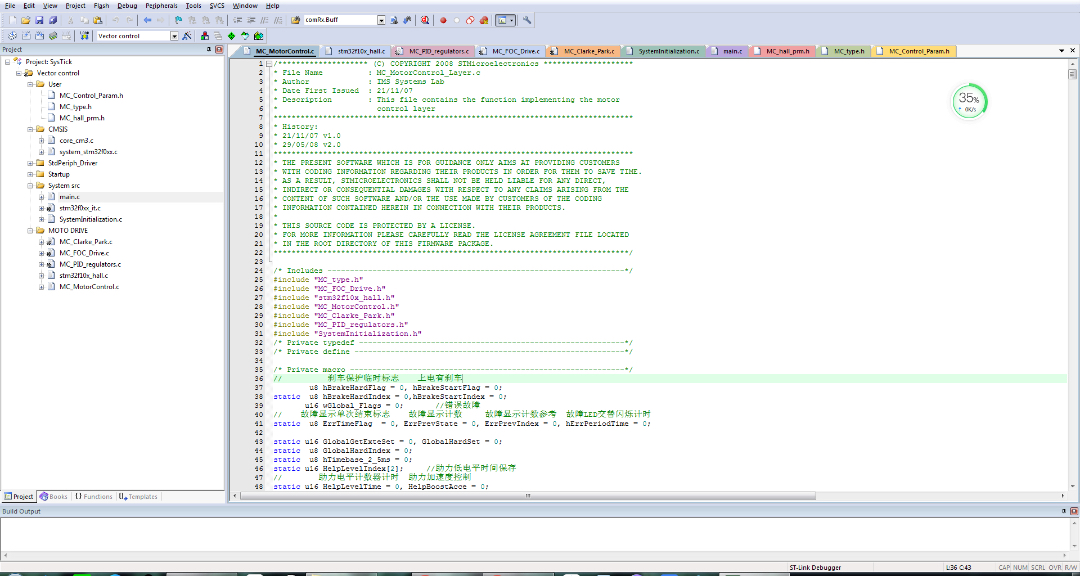
这套代码最牛逼的是功能闭环——从防盗的滚码加密到巡航时的速度环自整定,连铁塔通讯协议都内置了。现在搞电摩开发的兄弟算是捡着宝了,直接魔改参数就能上车,实测助力骑行时的扭矩平滑度吊打某铃原厂控制器。注意那个环形队列的滑动滤波,比单纯平均滤波多吃了两年盐——防突变量跳变的效果刚刚的。大厂成熟方案,直接可用,不是一般的普通代码可比的。大厂成熟方案,直接可用,不是一般的普通代码可比的。可用于电动自行车,滑
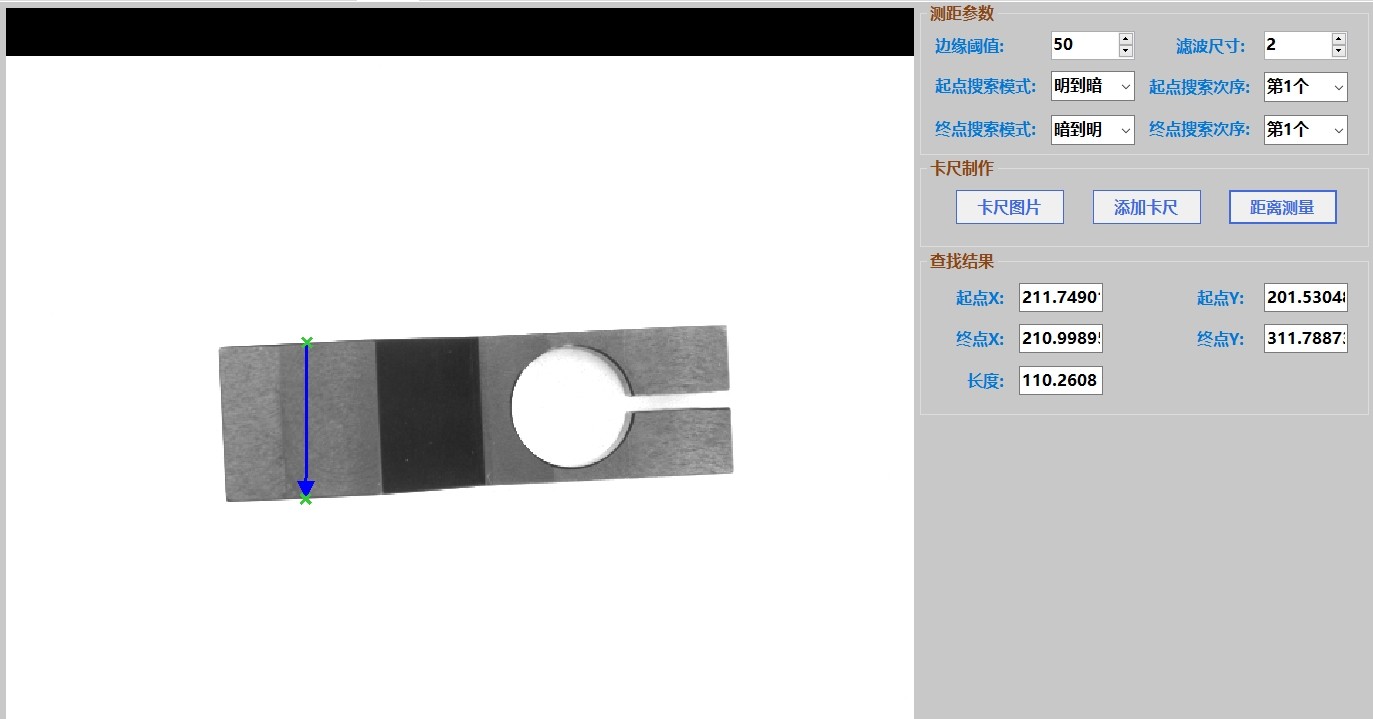
基于OpenCV C#开发的卡尺测距系统,是从实际运行项目中剥离的视觉测量解决方案,包含完整的视觉控件源码与测试图片,可实现图像显示、卡尺测量、距离计算等核心功能。系统采用模块化设计,分为图像显示控件模块、图形绘制模块、卡尺测量模块及数据交互模块,支持圆、直线、矩形等多种形状的测量需求,适用于工业检测、精密测量等场景。
边缘计算环境中基于启发式算法的深度神经网络卸载策略 本文综合考虑基于DNNs的应用响应时间、计算能耗和租用服务器的价格,使用启发式算法设计四种不同的任务卸载策略即基于终端设备的不卸载策略、基于云服务器的完全卸载策略、基于端云的部分卸载策略和基于端—边—云的多重资源卸载策略,同时综合粒子群算法和模拟退火算法提高算法的计算效率和计算结果的精准度。

这里有个坑要注意:S7-1200/1500在博途环境需要先启用"允许来自远程对象的PUT/GET通信"。欢迎PLC老司机们来提PR,或者分享你们在设备通信中遇到的奇葩问题——上周刚解决个1500PLC的TSAP地址冲突问题,这酸爽...支持S7-200Smart,S7-300,S7-400CPU通讯。支持S7-200Smart,S7-300,S7-400CPU通讯。支持博途S7-1200,S7-1
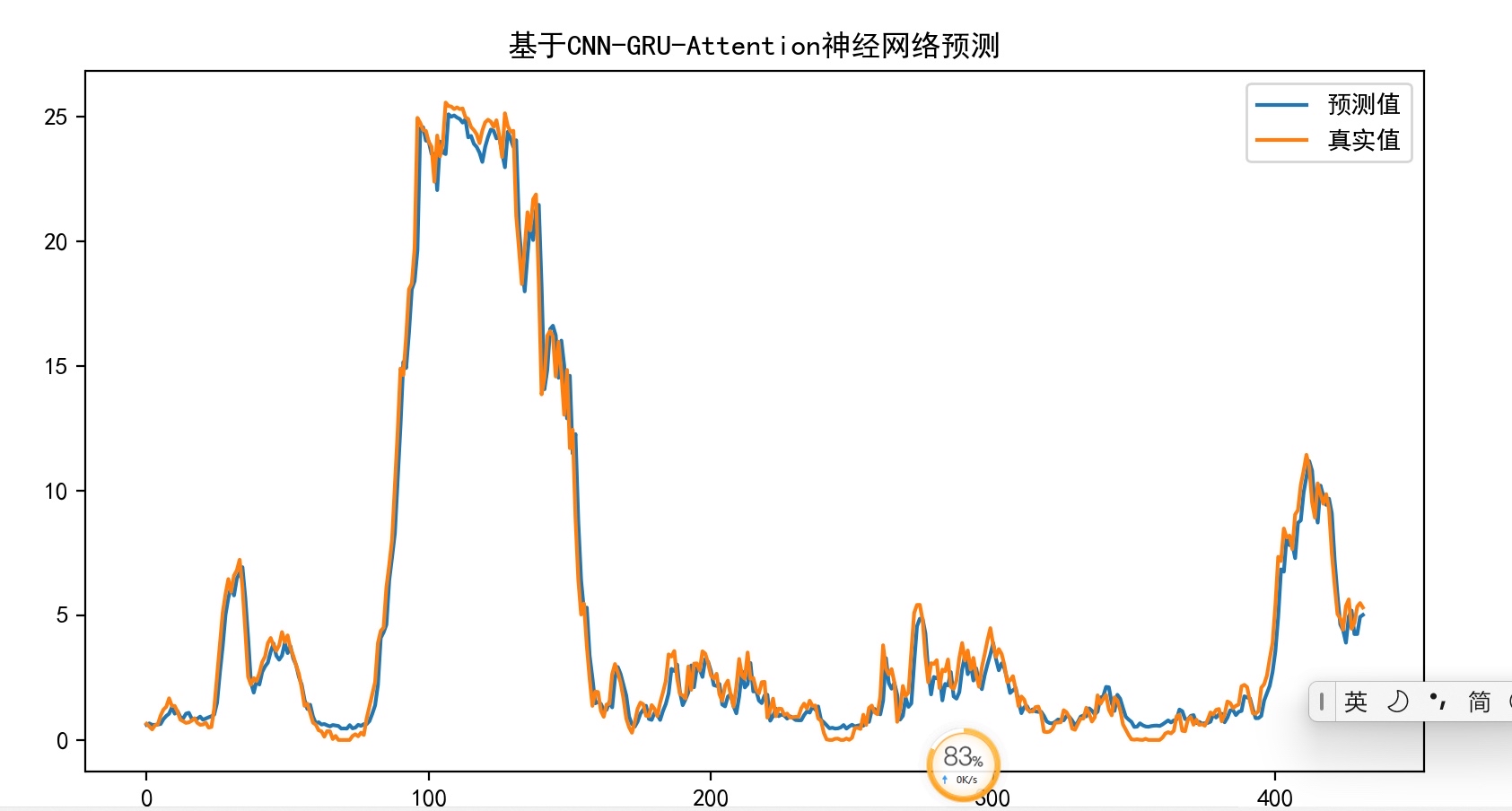
最近折腾了个CNN-GRU-Attention的缝合怪,实测在风电功率预测任务里比单一模型精度高了18%左右,关键是结构够灵活,换组数据就能跑。整个项目代码扔GitHub后,有个做电力调度的老哥换了负荷数据跑,MAPE直接干到3.2%,所以说这套结构的泛用性确实能打。不过要注意,输入特征的归一化方式直接影响注意力权重的有效性。基于加注意力机制(CNN-GRU-Attention)的时间序列预测程序
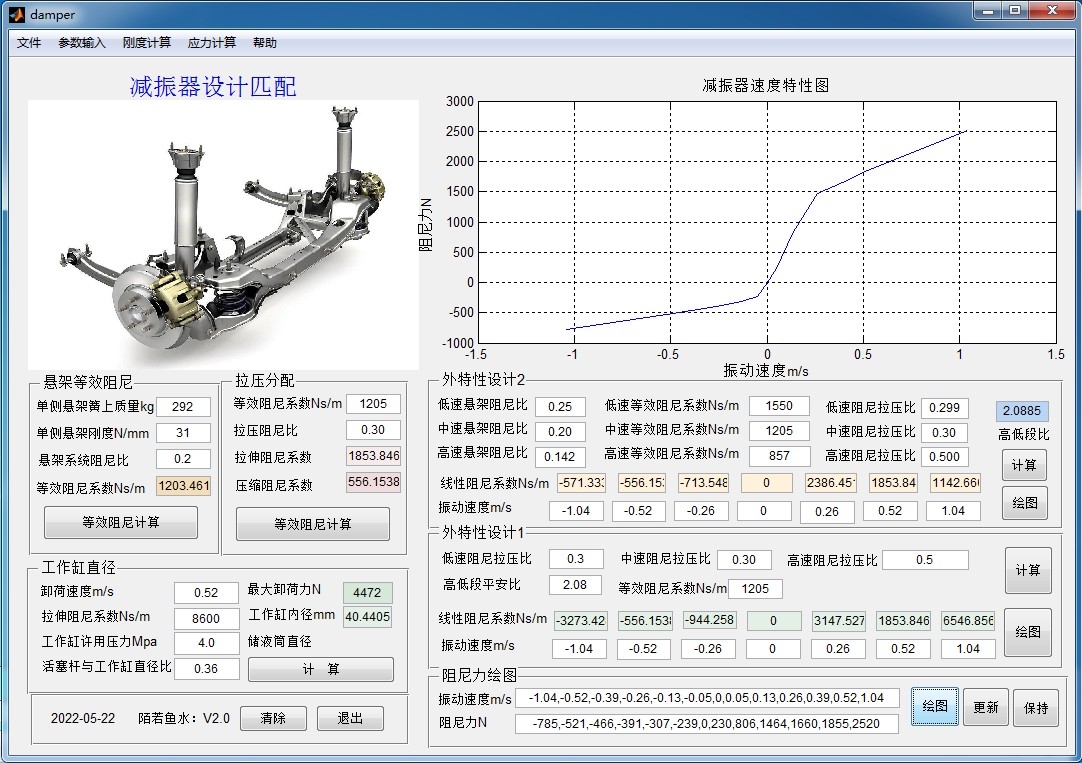
程序名称:悬架设计计算程序开发平台:基于matlab平台计算内容:悬架偏频刚度挠度;螺旋弹簧,多片簧,少片簧,稳定杆,减震器的匹配计算;悬架垂向纵向侧向力学、纵倾、侧倾校核等;独立悬架杠杆比,等效刚度、等效阻尼等;适用对象:学习群体、初入行技术人员特点作用:独立悬架和板簧悬架均适合,计算结果满足工程要求,具体请见图片申明提示:(1)程序主要解决设计计算问题,计算结果均经工程验证,本人也用其开展设计
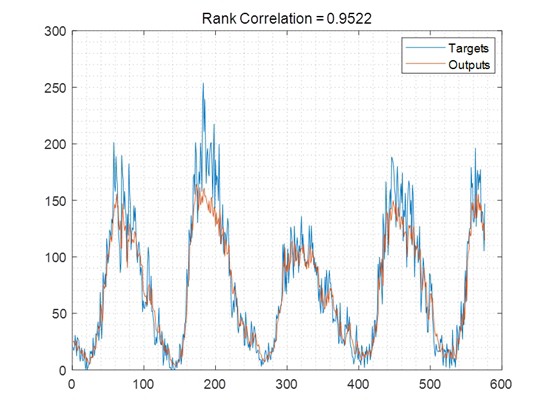
1997 年 Schuster 提出的双向循环神经网络 BiRNN 可以说是一个重要的里程碑,它由一个正向和反向的循环神经元组成,前向神经元的输出直接作为后向神经元的输入,这一独特的结构让模型对序列的处理有了新的视角。鉴于双向长短时记忆网络的这些优势,我参与的这个项目决定采用 BiLSTM 对多种时间序列进行预测,像国际航空旅客人数预测、全球冰储量预测、感染水痘人数预测、极紫外光预测、事故预测以及