- @dgnKdiOPcN
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
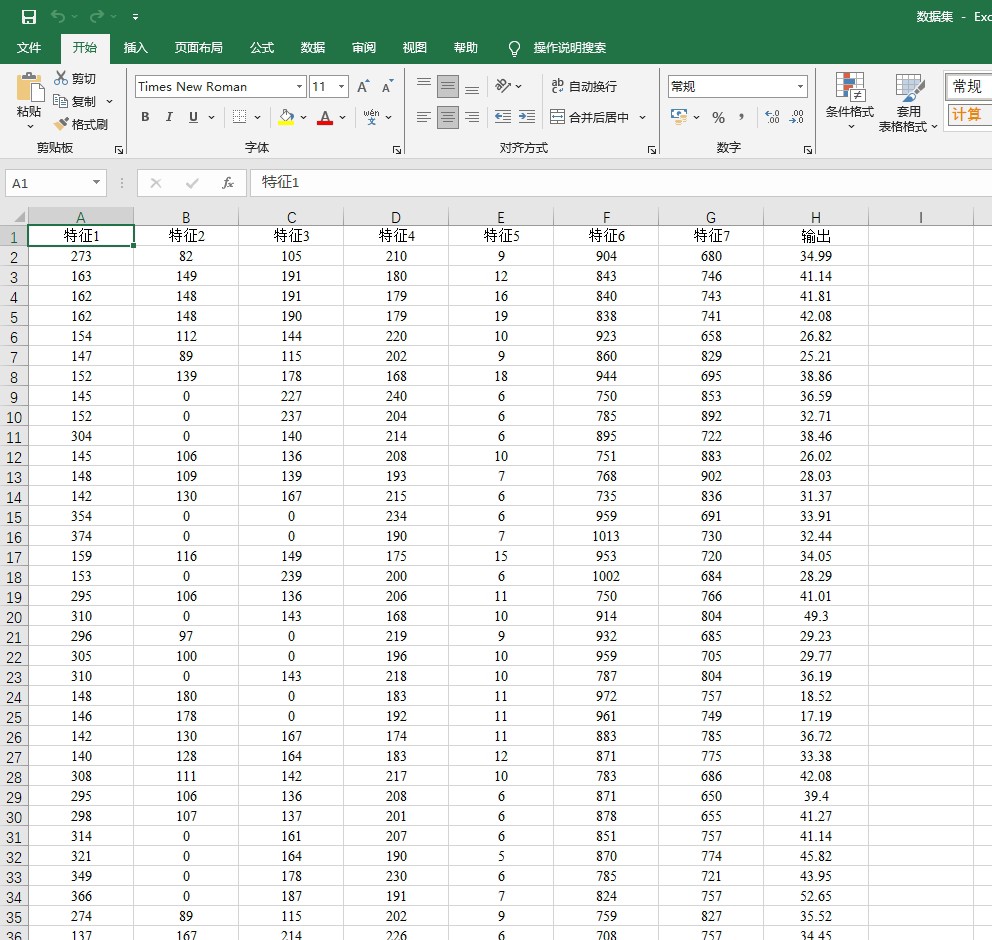
LSTM-Multihead-Attention回归预测 基于长短期记忆神经网络(LSTM)结合多头注意力机制(Multihead-Attention)多变量回归预测[可以修改为时序预测,前]LSTM-Multihead-Attention回归预测 基于长短期记忆神经网络(LSTM)结合多头注意力机制(Multihead-Attention)多变量回归预测[可以修改为时序预测,前]、评价指标包括:
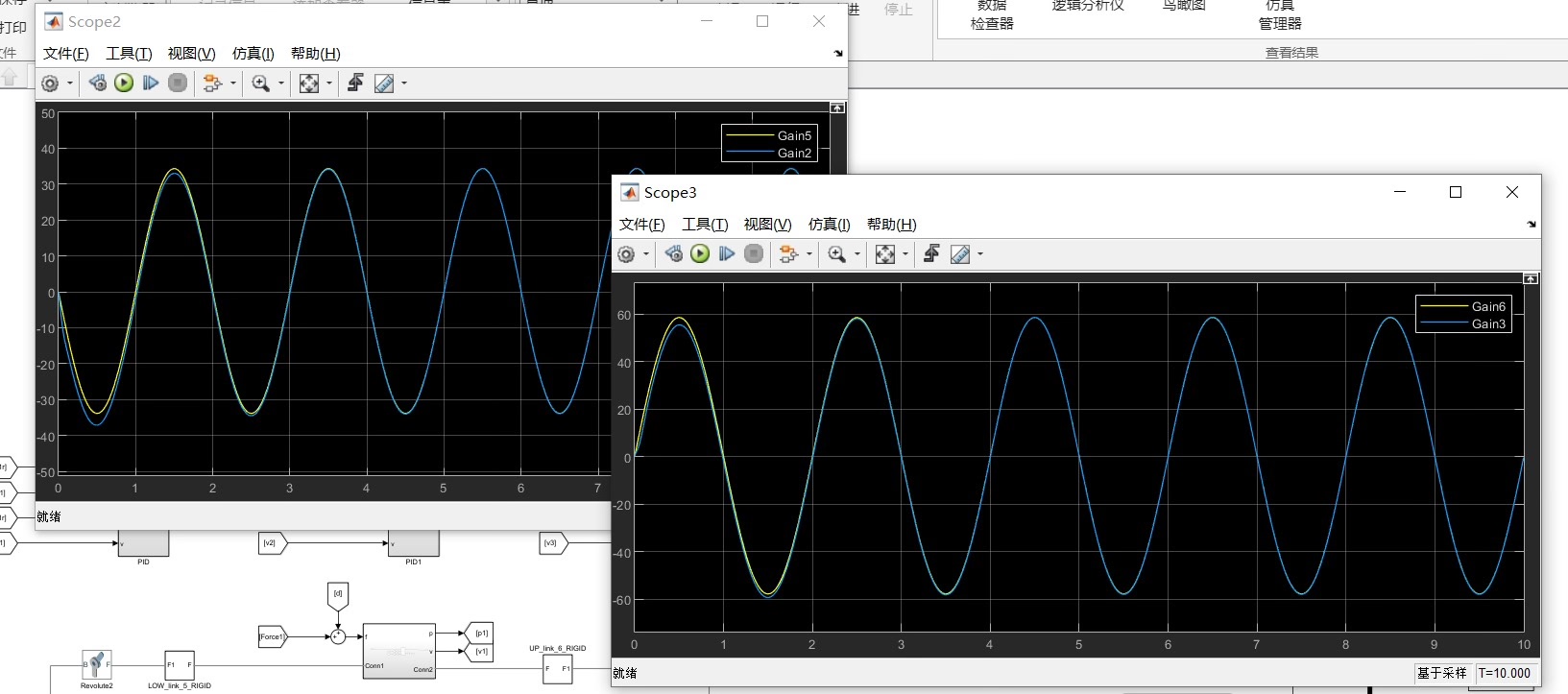
今天咱们用MATLAB的Simulink/SimScape工具箱,手把手搭建一个完整的动力学仿真流程。经过实测,在i5处理器上运行30秒轨迹跟踪仿真,误差能稳定在±0.12mm以内。最后提醒:并联机构参数敏感性高,建议先用参数扫描功能做批量测试,找到最优刚度系数组合。MATLAB3-rps并联机器人动力学仿真,运动学仿真控制,simulink/simscape。MATLAB3-rps并联机器人动力
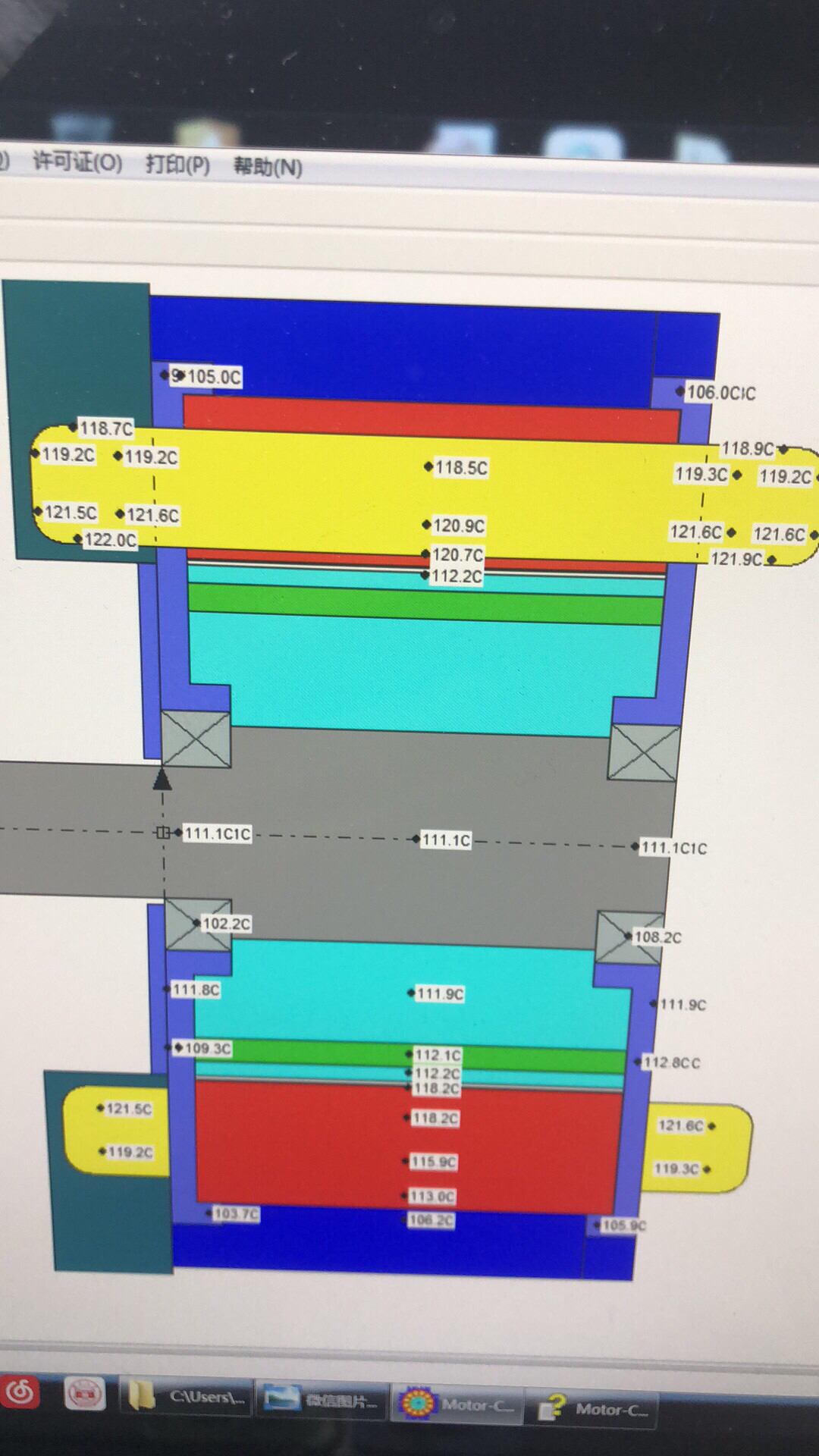
把气隙网格从3层加到5层,齿部细化3倍,虽然计算时间翻了两番,但逮住个诡异的局部饱和现象——额定点附近某些齿的磁密竟飙到2.3T,难怪之前样机测试时总有高频噪音。今天拆解一个5kW的永磁同步电机设计案例,这玩意儿功率密度高得离谱,定子齿上还开了辅助槽专门治齿槽转矩的毛病。别直接用108V除以3,永磁同步电机的线电压和相电压关系得按矢量合成处理,这里要是搞错了,后续电磁场计算准跑偏。每增加0.1mm
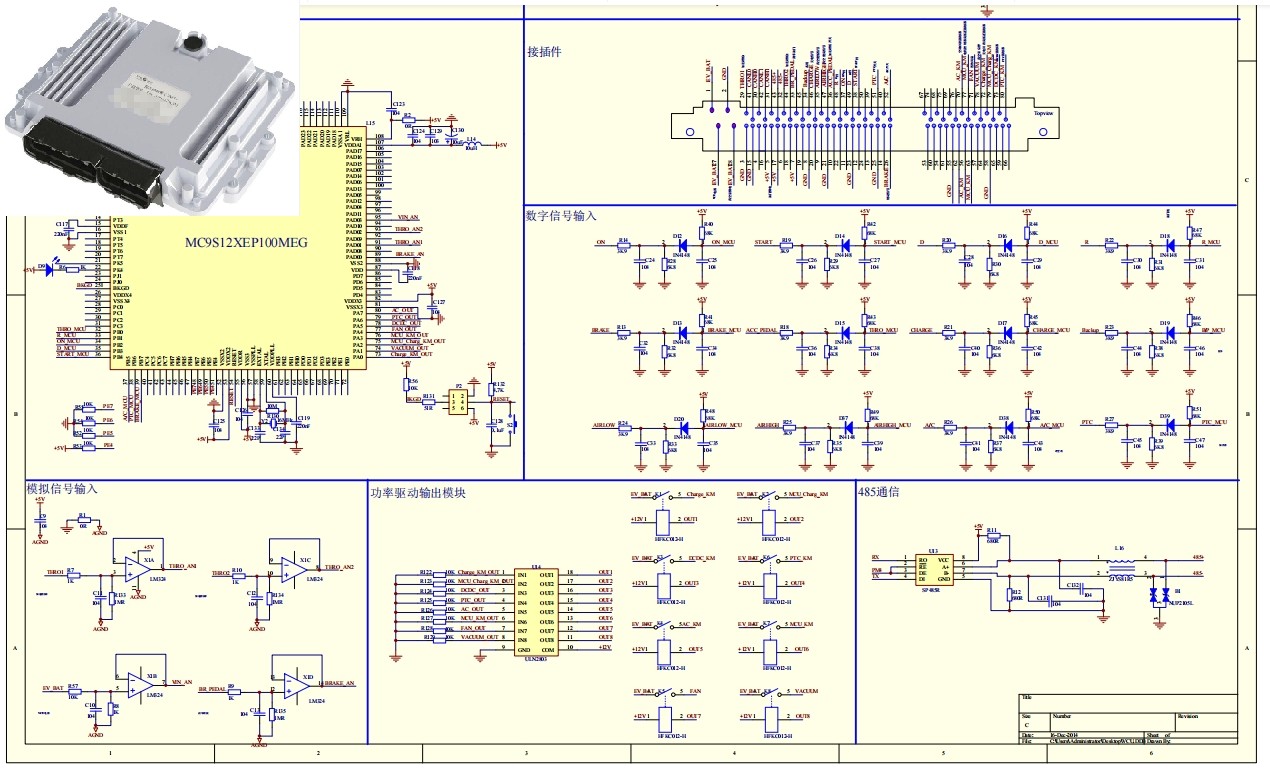
基于MC9S12XEP100 完成代码,原理图,PCB, 详细控制策略,车辆运行模式管理,通讯协议.BootLoader介绍 CAN总线设计 VCU国标技术要求。整车控制策略:上电逻辑,整车能量优化管理策略,制动能量回馈控制策略,驱动控制策略,辅机控制策略,充电策略,整车能量优化管理策略,. 安全保护策略。整车控制策略:上电逻辑,整车能量优化管理策略,制动能量回馈控制策略,驱动控制策略,辅机控制策
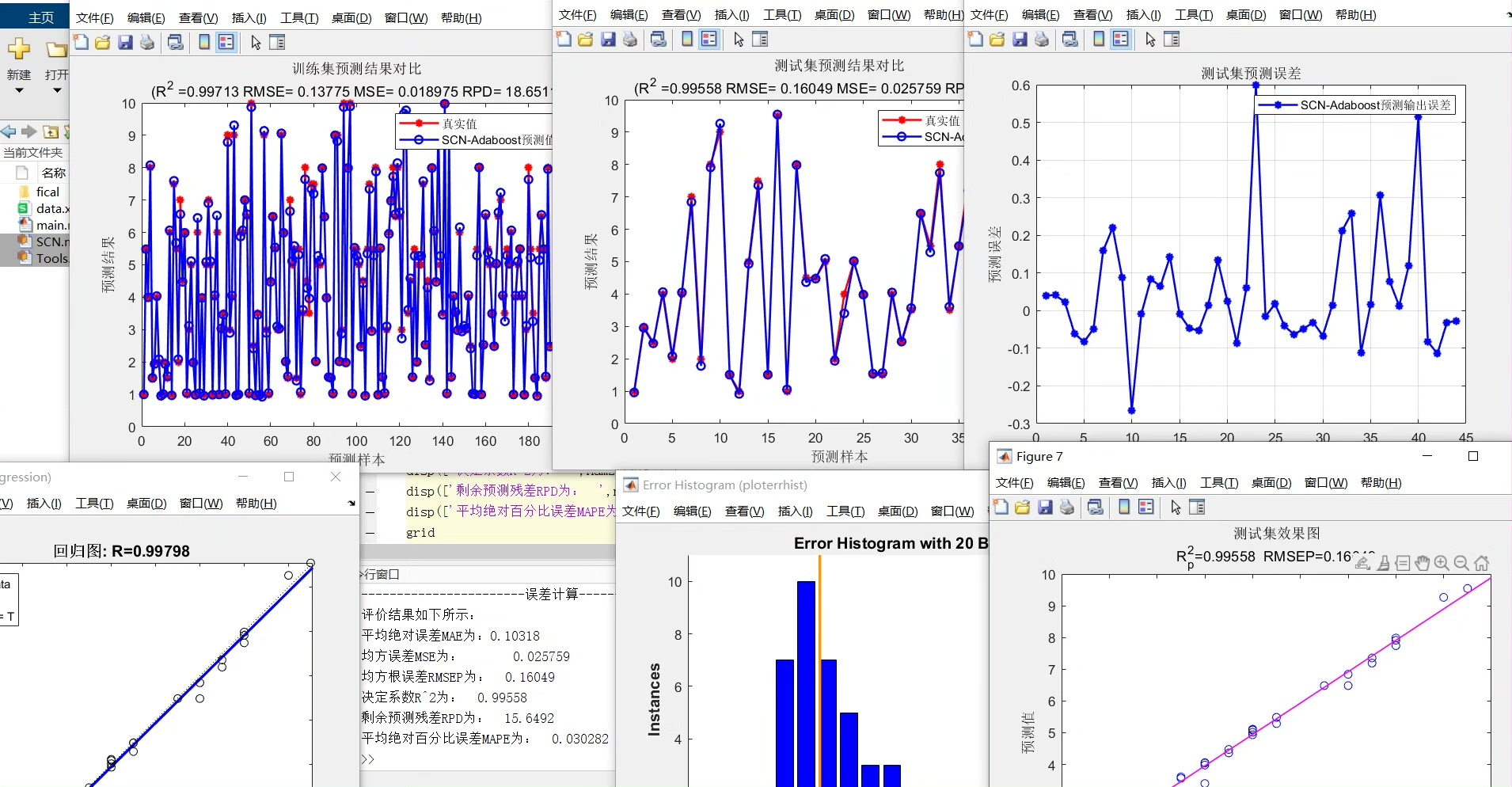
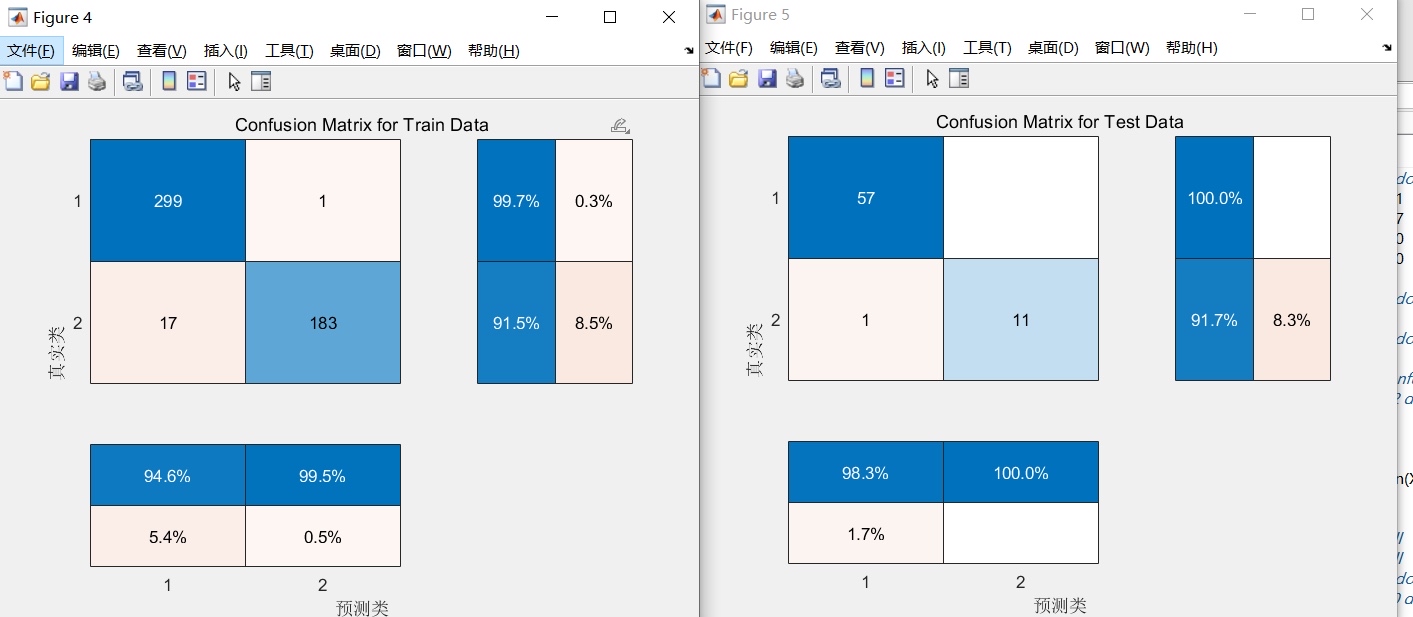
SCN-adaboost基于随机配置网络SCN的Adaboost回归预测,SCN-Adaboost回归预测,多输入单输出模型。评价指标包括:R2、MAE、MSE、RMSE和MAPE等,代码质量极高,方便学习和替换数据。在机器学习的广袤世界里,回归预测一直是一个热门话题。今天咱们就来聊聊基于随机配置网络 SCN 的 Adaboost 回归预测,也就是 SCN - Adaboost,而且是多输入单输出
LSTM-Multihead-Attention回归预测 基于长短期记忆神经网络(LSTM)结合多头注意力机制(Multihead-Attention)多变量回归预测[可以修改为时序预测,前]LSTM-Multihead-Attention回归预测 基于长短期记忆神经网络(LSTM)结合多头注意力机制(Multihead-Attention)多变量回归预测[可以修改为时序预测,前]、评价指标包括:
MATLAB代码 群智能优化算法分类回归 时序预测SVM支持向量机分类预测回归预测29.9INFO-SVM JSOA-SVM SO-SVM BES-SVM等等LSSVM 最小二乘支持向量机 分类预测 回归预测29.9INFO-LSSVM JSOA-LSSVM SO-LSSVM BES-LSSVM等等ELM 极限学习机 分类预测 回归预测 29.9SSA-ELM SMA-ELM PSO-ELM GW
遇到过最魔幻的情况是盐分场震荡导致整个模型在临界状态反复横跳,后来在求解器配置里把时间步长上限压到0.1天,调了三次谐波阻尼才稳住。最后说个实战技巧:冻结锋面追踪别傻乎乎用移动网格,试试在结果里后处理提取0℃等温线,配合表面流速矢量图,效果比硬算相界面省时得多。毕竟冻土模拟就像煮夹生饭,火候过了容易糊,火候不到又夹生,这个度得在参数化和简化模型之间找平衡。特别注意当温度在相变区间(-1℃到0℃)时

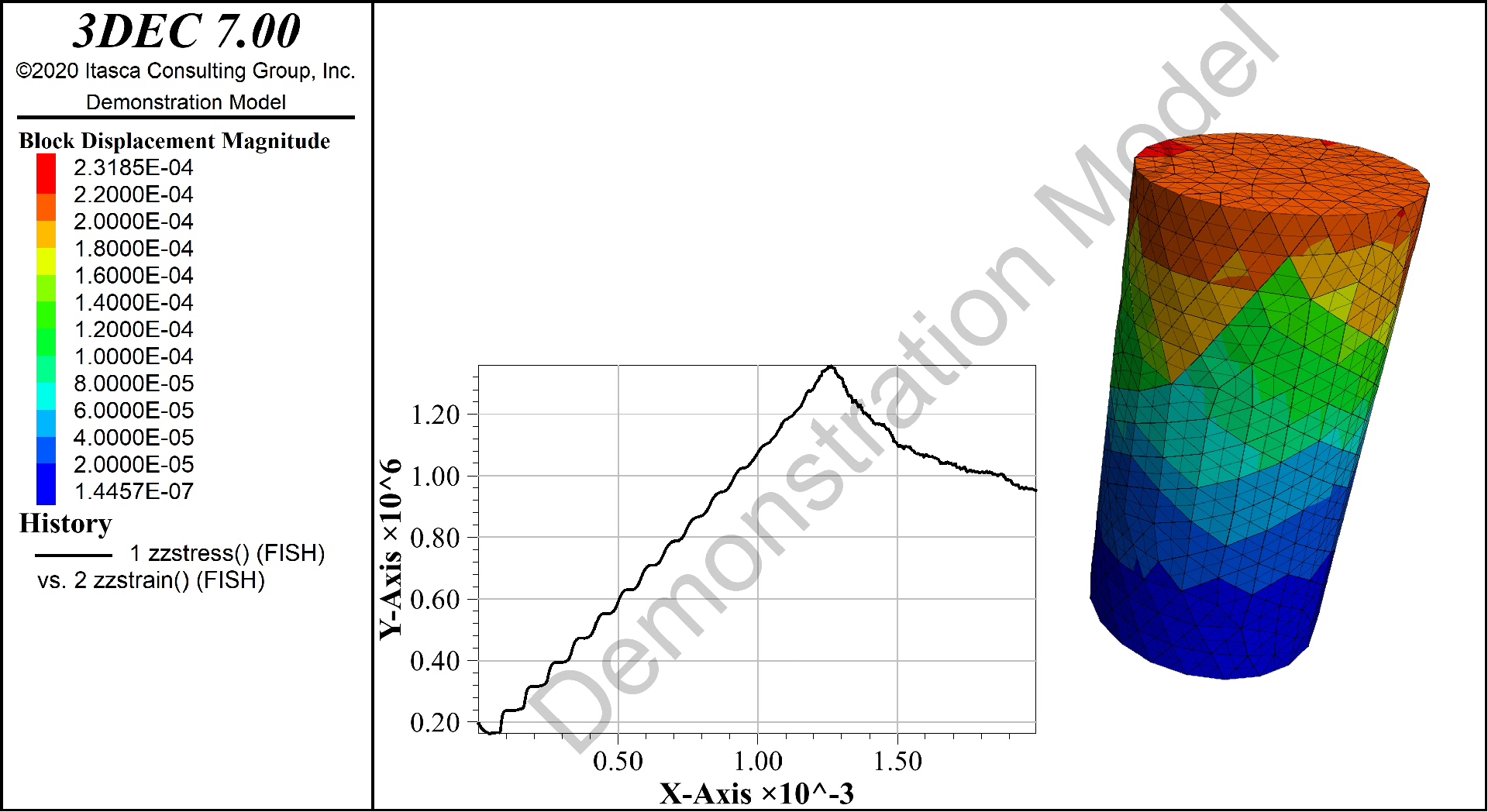
3dec7.0单轴压缩实验。3dec三轴试验内容包含计算命令流,计算结果,计算结果真实有效,该命令对相关实验模拟具有一定参考性。在岩土工程等诸多领域的研究中,3dec 数值模拟软件发挥着重要作用。今天咱就来唠唠 3dec 里单轴压缩实验以及三轴试验的那些事儿,顺便附上超实用的计算命令流,还有真实有效的计算结果分析。
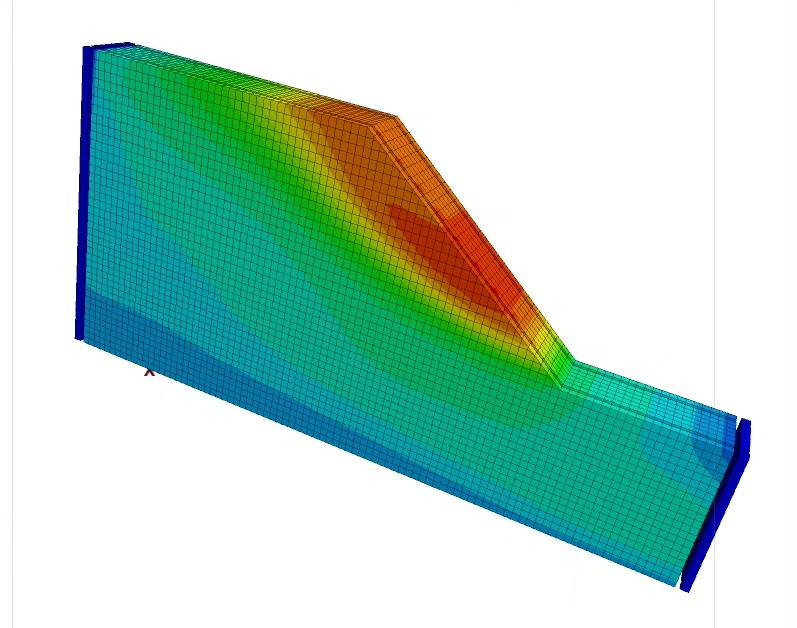
特别是输入阪神地震波的时候,边坡动力响应特别能反映真实场景。这里有个坑——FLAC3D的wave apply默认是速度边界,要是在动力分析设置里没选对类型,边坡直接给你表演原地升天。不过要真做论文的话,记得拿实际地质参数校核,别直接用默认参数——毕竟现实中的边坡可比模型调皮多了。interval=50这个采样间隔别瞎改,太密了数据量爆炸,太疏了错过峰值。别问我是怎么知道的,说多了都是泪。采用自由场