




- @dedell
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
将实例内核对应的mask prediction 与GT掩码进行比较,如果对象对应的掩码的IoU高于a1,则内核嵌入被定义为对象的正嵌入;Video K-Net通过基于内核的外观建模和跨时间内核交互,学会了同时分割和跟踪视频中的“things”和“stuff”(语义分割和实例分割)。在原来的K-Net解码器之后添加了一个额外的轻量级嵌入头,以提取每个内核的嵌入特征。学习内核关联嵌入的目的是对两帧之间
1、卷积与互相关在深度学习中,卷积中的过滤器不经过反转。严格来说,这是互相关。我们本质上是执行逐元素乘法和加法。但在深度学习中,直接将其称之为卷积更加方便。因为过滤器的权重是在训练阶段学习到的。如果上面例子中的反转函数 g 是正确的函数,那么经过训练后,学习得到的过滤器看起来就会像是反转后的函数 g。2、3D卷积对比的,2D卷积为全通道的,不会在通道轴上滑动。3、转置卷积(去卷积)(反卷积)对应的
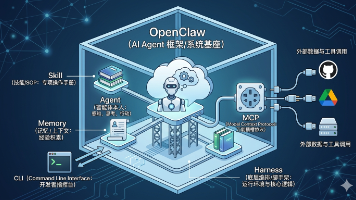
OpenClaw提供了一个具有完整系统权限的本地化运行时,但缺乏长时间、多机器人执行所需的具身控制架构。因此,我们提出了 ABot-Claw,这是 OpenClaw 的一个具身扩展版本,它集成了:统一的具身接口,具有能力驱动的调度功能,用于异构机器人的协同;以视觉为中心的跨具身多模态记忆,用于持久的上下文保留和具身基础检索;基于评估者(critic)的闭环反馈机制,结合通用奖励模型,用于在线进度评
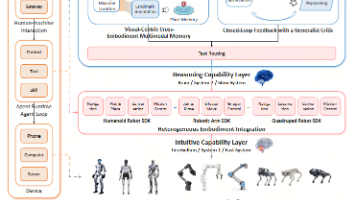
OpenClaw提供了一个具有完整系统权限的本地化运行时,但缺乏长时间、多机器人执行所需的具身控制架构。因此,我们提出了 ABot-Claw,这是 OpenClaw 的一个具身扩展版本,它集成了:统一的具身接口,具有能力驱动的调度功能,用于异构机器人的协同;以视觉为中心的跨具身多模态记忆,用于持久的上下文保留和具身基础检索;基于评估者(critic)的闭环反馈机制,结合通用奖励模型,用于在线进度评
第一个思考是:视频本身是序列级别的数据,能否直接将其建模为序列预测的任务?比如,借鉴自然语言处理(NLP)任务的思想,将视频实例分割建模为序列到序列(Seq2Seq)的任务,即给定多帧图像作为输入,直接输出多帧的分割Mask序列,这时需要一个能够同时对多帧进行建模的模型。第二个思考是:视频的实例分割实际同时包含实例分割和目标跟踪两个任务,能否将其统一到一个框架下实现?
1、卷积与互相关在深度学习中,卷积中的过滤器不经过反转。严格来说,这是互相关。我们本质上是执行逐元素乘法和加法。但在深度学习中,直接将其称之为卷积更加方便。因为过滤器的权重是在训练阶段学习到的。如果上面例子中的反转函数 g 是正确的函数,那么经过训练后,学习得到的过滤器看起来就会像是反转后的函数 g。2、3D卷积对比的,2D卷积为全通道的,不会在通道轴上滑动。3、转置卷积(去卷积)(反卷积)对应的
教程网址:http://zh.d2l.ai/配置环境1,安装运行环境使用cmd,不要使用powershell2,如果之前安装过其它版本的Python,在环境配置中删除所有关于Python的路径。(办法简单粗暴有效,缺点是以前安装的不能用了)、3,python自带的ide可以在windows的搜索中搜索idle,或者安装目录下的pythonw.exe打开也可。若无法打开,可以...
精度(accuracy)=(TP+FN)/ALL有多少选对了错误率=(TN+FP)/ALL有多少选错了查准率(Precision)=TP/(TP+FP)选出来的有多少对的。查全率(Recall)=TP/(TP+FN)有多少对的被选出来。AP(Average Precision):对每个R对应的P都加起来,求均值。(单个类的的PR曲线面积。)mAP:所有类的AP求均值。...
精度(accuracy)=(TP+FN)/ALL有多少选对了错误率=(TN+FP)/ALL有多少选错了查准率(Precision)=TP/(TP+FP)选出来的有多少对的。查全率(Recall)=TP/(TP+FN)有多少对的被选出来。AP(Average Precision):对每个R对应的P都加起来,求均值。(单个类的的PR曲线面积。)mAP:所有类的AP求均值。...