- @cvcNYgAdnd
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
最后说个骚操作:用SQL的FOR XML PATH直接把数据拼成HTML表格,在WinCC的WebBrowser控件里直接渲染。这段代码里的坑主要在连接字符串格式,特别是SQL身份验证和Windows验证的切换(用Integrated Security=SSPI替代账号密码)。最近在车间折腾WinCC报表的时候发现个挺有意思的事儿——这玩意儿配合SQL数据库能玩出不少花样。先来个最基础的日报表模板
这套操作把误检率从15%压到1.8%的关键,在于那个动态ROI聚焦——像极了老师傅拿着放大镜在产线巡检的姿势,算法自己知道该盯着哪里看。现在这软件已经成了我的开工必备,特别是当甲方又双叒叕改需求的时候——毕竟能让我在咖啡馆里就搞定80%调试工作的工具,谁用谁真香。最近给汽车配件厂做的密封圈检测项目,从通讯调试到稳定运行只用了两天,产线老哥差点以为我给他装的是破解版外挂。这玩意儿直接把我的项目周期从
这类由Stewart平台演化而来的精密设备,每个支链都像相互纠缠的藤蔓,把六个伺服电机的转动耦合成了末端执行器的空间芭蕾。但正解才是真正的魔鬼——当六个电机停止转动时,末端的位姿就像被锁在六维迷宫里的宝藏。我们开发了基于运动连续的预测机制——用上一时刻的解作为当前迭代的初始猜测。真正玄妙的是残差函数的设计。六个约束方程不仅要描述支链长度与位姿的关系,还得处理万向节的运动约束。示教器屏幕上的位姿数据
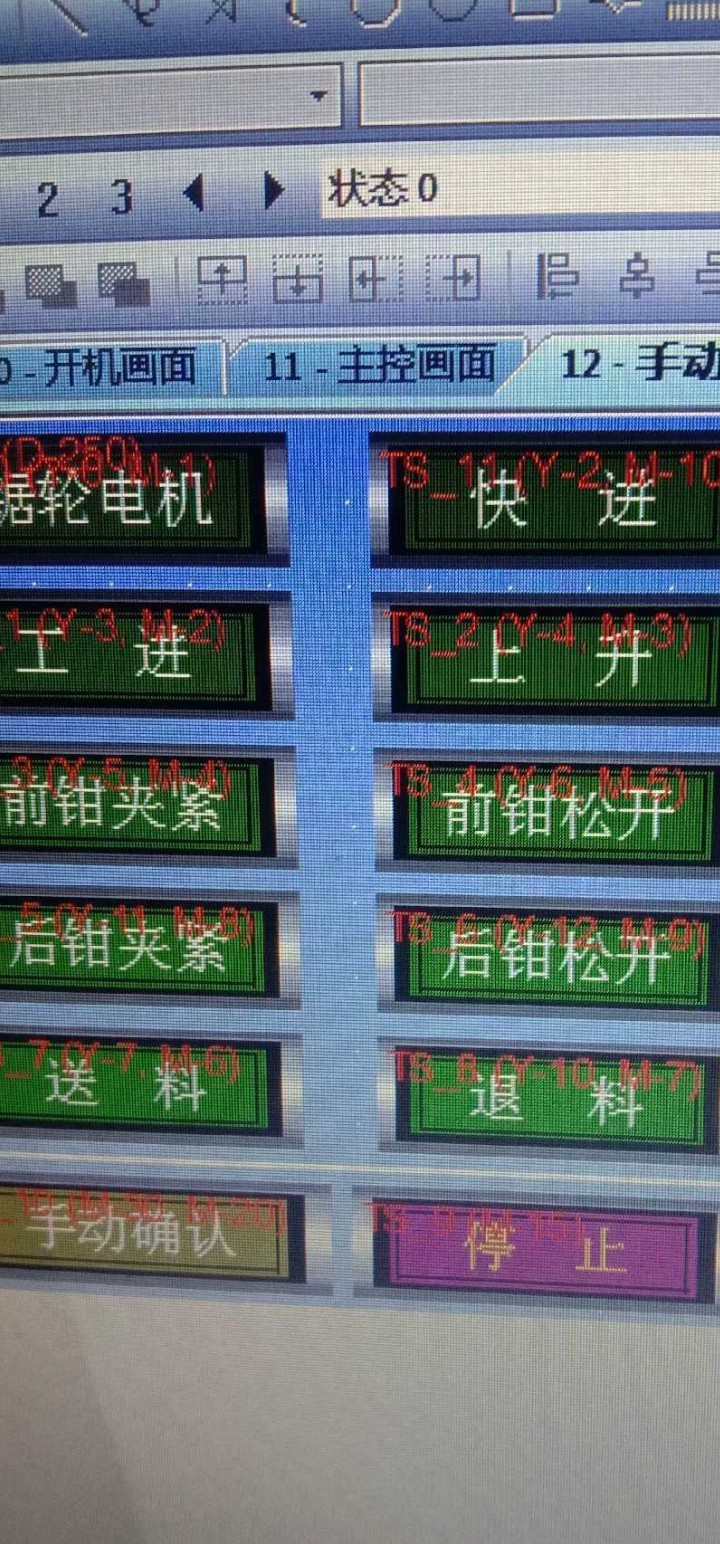
翻完整个程序最大的感受是:稳定可靠的系统未必需要多炫技的代码,关键是把异常处理做扎实,变量命名规范,再加上满屏的注释——这比任何架构图都来得实在。这套程序里甚至给每个电磁阀都标注了物理位置,比如"Y3: 主夹紧缸后退阀",这种细节对后来维护的人来说简直是救命稻草。台达PLC这边用PR指令做数据收发,威纶通的设备参数设置里直接选DVP协议,波特率设置成一致的19200就没出过幺蛾子。突然想起去年在另
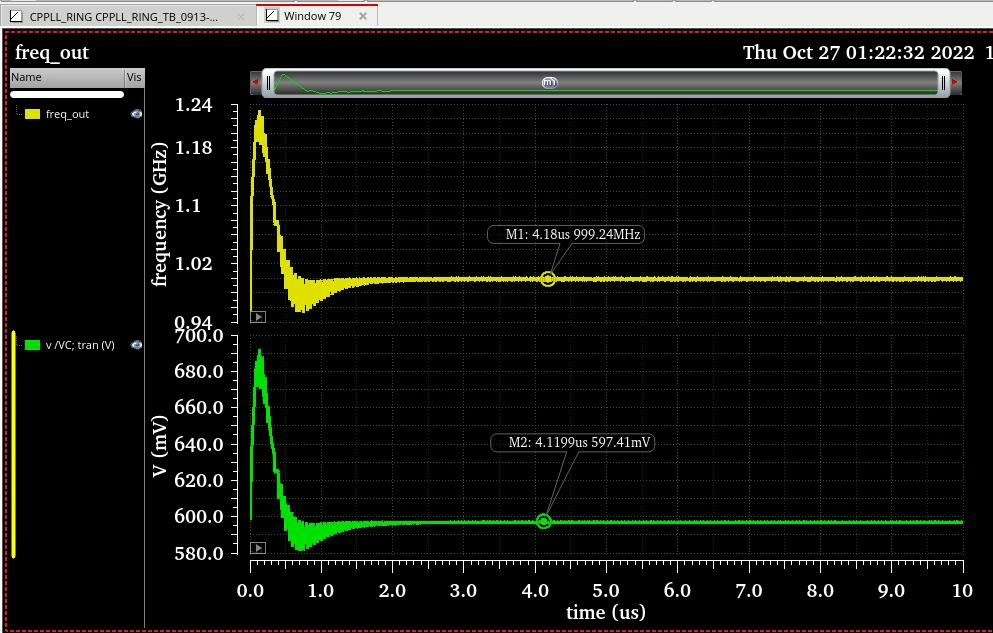
锁相环学习电路,有教程对新手非常友好,一看就懂[1],输出频率800MHz或者1GHz,采用Ring_VCO的结构[2],输入参考频率20MHz[3],分频器是40-50分频4,电荷泵电流20uA5,工艺是smic 55nm每个模块都有单独的testbench可送一些仿真,设计参考资料还有matlab,verilog-a建模推导。cadence官方手把手教你仿真文档锁相环的理论推导,相位噪声呈现最
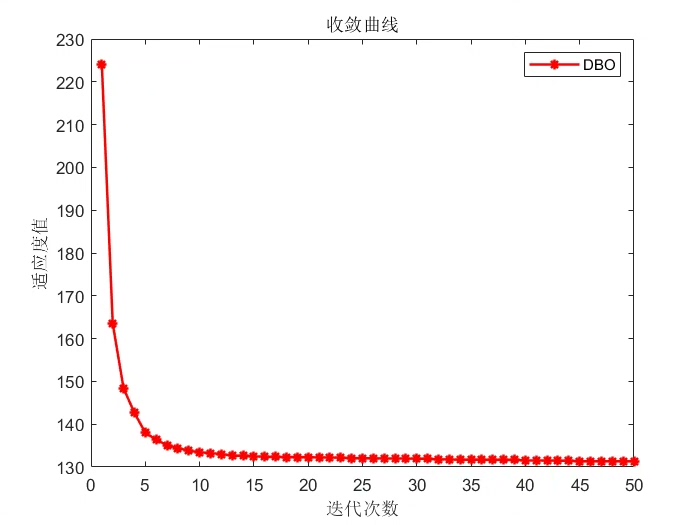
Matlab完整源码和数据(1.基于MFO-TCN-BiGRU-Attention飞蛾扑火算法优化时间卷积双向门控循环单元融合注意力机制多变量时间序列预测,要求Matlab2023版以上;2.输入多个特征,输出单个变量,考虑历史特征的影响,多变量时间序列预测;3.data为数据集,main.m为主运行即可,所有文件放在一个文件夹;4.命令窗口输出R2、MSE、MAE、MAPE和RMSE多指标评价;
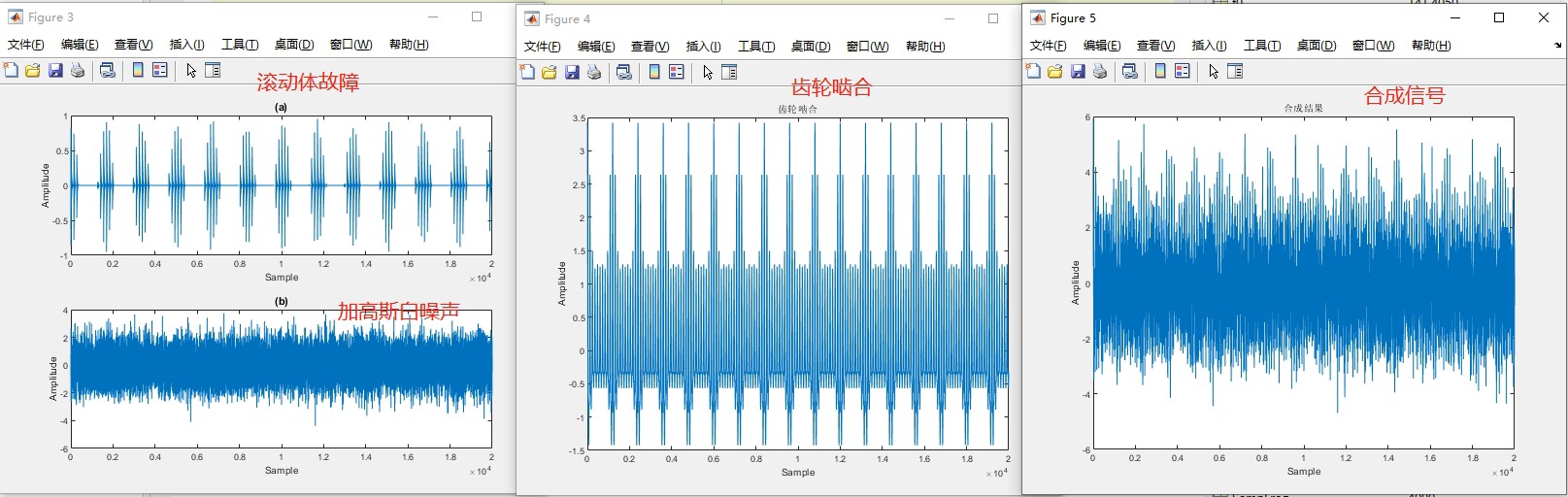
今天咱们就手搓一个高难度仿真信号——轴承三兄弟(外圈、内圈、滚动体)的故障脉冲,再往死里加噪声和齿轮啮合干扰,最后用几个硬核算法来验证效果。这时候你会看到波形像心电图抽风似的,既有周期性冲击,又有高频振荡,还夹杂着野生的毛刺,真实感直接拉满。轴承故障脉冲仿真(外圈,内圈,滚动体),再此基础上加噪声,齿轮啮合,基于上述三个合成高干扰信号。轴承故障脉冲仿真(外圈,内圈,滚动体),再此基础上加噪声,齿轮
这玩意儿实测能扛42/57/60/86两相步进电机,闭环模式下堵转直接硬刚,开环模式还能向下兼容老设备,实测效果比某些商业驱动器还要顶。虽然成本高了点,但实测在86电机堵转时,普通单光耦方案会出现驱动信号畸变,这个设计直接解决问题。STM32F401平台闭环步进驱动方案,支持开环模式兼容42,57,60 86两相开环闭环步进电机,提供原理图+PCB+源代码。STM32F401平台闭环步进驱动方案,

EPLAN史上最全部件库,部件宏,EDZ格式,大小合适导入容易 部件包含图片宏,尺寸宏,有西门子全系列PLC,s7-1200 1500 300 400 200三菱FX系列,数字模拟,特殊模块,三菱变频器,伺服,触摸屏,台达,施耐徳,正泰,欧姆龙,得力西,ABB等低压电器等等。这玩意儿最狠的是直接把元件尺寸宏做成了1:1比例,拖个接触器到布局图里,连螺丝孔位都能和实物毫米级对齐。举个栗子,拖个S7-
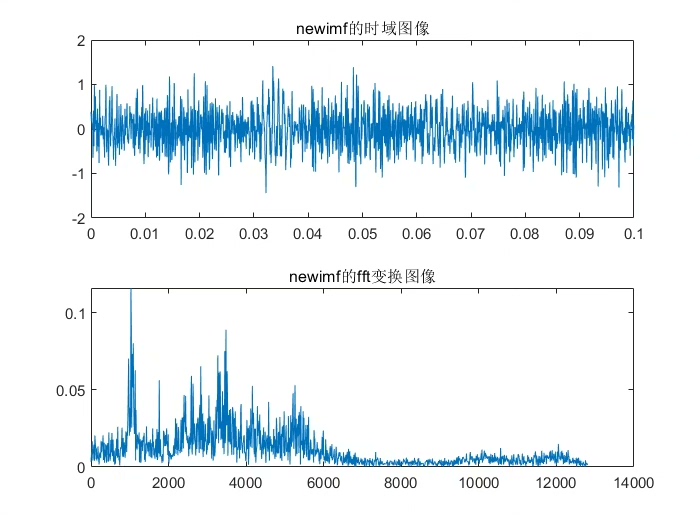
老规矩,先上效果:当振动信号的时频谱在你眼前展开时,你会听见CPU风扇在尖叫。这时候80Hz的成分会老实出现在高频IMF里,而15Hz主频可能被拆分到中低频IMF,FFT结果比相亲对象还诚实。3.选择一部分imf分量重构信号,并展示重构信号的时域图像及fft变换后的频域图像。3.选择一部分imf分量重构信号,并展示重构信号的时域图像及fft变换后的频域图像。matlab实现对信号做emd分解,对分