




- @chenxin0215
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本人最近开始调研和学习同态加密,由于好多知识需要系统性学习,基础的知识包括,格加密,格上困难问题及各类问题之间的归约,LWE以及RLWE 相关概念等,同态方案基本是从Gentry博士论文开始看,随后第二代(BFV、BGV),第三代(GSW)针对布尔电路或算术电路的同态加密及其改进方案不断被提出,(要学的东西好多!!),主要学习途径就是看论文以及看 Zhihu 上大神的帖子。为了理解LWE基本原理,
最近刚开始openai-agents-sdk的使用,发现在流程设计,agent 配置以及调用方面确实做到了极为精简,格式化输入与输出也非常方便控制,虽然OpenAI-agents-sdk原生支持openai自家提供的模型,不过在这“群模林立”的形势下,OpenAI-agents-sdk也良心地支持外部模型的接入和使用。使用本地模型,则需要将tracing 关掉,即: set_tracing_dis
Auto tool choice. tells vLLM that you want to enable the model to generate its own tool calls when it deems appropriate. 开启vllm支持函数调用功能。vllm 推荐 对于qwen2.5 以及 QwQ系列,启动选项配置为“--tool-call-parser hermes”vll
之前已经学过了机械臂的坐标变换,只是大概知道向量的变换,齐次坐标表示的思想等,并没有对公式扣细节,后来发现有的时候在想问题的时候还是容易迷糊。这里就做一个极简单的总结。需要说明的是,坐标全部按右手系规则进行。比如,已被人熟知的齐次坐标变换如下:关键是理解其中的变换矩阵,表示从B坐标系到W坐标系的变换矩阵(注意:是齐次变换矩阵哦)其形式为:迷糊的地方在于:1.一般叙述通常会说,代表从坐标系B到坐标系
格式化输出是agent能够规范完成任务的基础。相比直接使用LLM,使用prompt调优来规范LLM的格式化输出,这一步在OpenAI-agent-sdk中内部已经处理好了,用户直接通过定义tool 的输出格式,以及agent的输出格式,这些格式可以是pydantic的BaseModel类。
Auto tool choice. tells vLLM that you want to enable the model to generate its own tool calls when it deems appropriate. 开启vllm支持函数调用功能。vllm 推荐 对于qwen2.5 以及 QwQ系列,启动选项配置为“--tool-call-parser hermes”vll
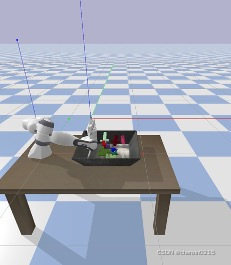
最近除了玩ros 也开始了pybullet的学习和使用,毕竟在不花钱的情况下做DRL,pybullet确实提供了太多的便利。安装和基本使用略过,非常简单,直接pip install pybullet 就可以,无非会检查当前机器的c++编译器的版本,细节不说了。主要记录下在pybullet中坐标变换,以及欧拉角的约定(这里说的就是 pybullet,有扛精说bullet里面本来如何如何的,请直接绕道
1)直接使用rosparam 命令如下(截图自古月居课程):2)写node进行 加载,并且保持重置数值:以防被其他节点修改;新建一个包,添加以下脚本#!/usr/bin/pythonimport rospy# this is the data node# data node would refresh the parameters# keep the constants reset# in cas