




- @bornfree5511
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
我将文章发表在了古月居,一起来看看吧!戳这里 -> 古月居猜你想看:Ubuntu助手 — 一键自动安装软件,一键进行系统配置深度强化学习专栏 —— 1.研究现状深度强化学习专栏 —— 2.手撕DQN算法实现CartPole控制深度强化学习专栏 —— 3.实现一阶倒立摆深度强化学习专栏 —— 4. 使用ray做分布式计算深度强化学习专栏 —— 5. 使用ray的tune组件优化强化学习算法的超
目前网上多数美化都是调成Darcula模式,使用Monokai color scheme。但是缺点是代码区和软件面板不一个颜色,看起来非常蓝瘦。1. File -> Settings -> plugins,搜索 Material Theme UI和Indent Rainbow2. 重启软件后,...
详细解读DQN一. 强化学习1. 什么是强化学习问题?2. 强化学习的理论体系(1).MDPMarkov PropertyMarkov ProcessMarkov Decision Process(2).R(reward)R(reward)R(reward)(3). Value FunctionValue\ FunctionValue Function一. 强化学习1. 什么是
https://zhuanlan.zhihu.com/p/24392239一. Lua 语言的程序包(运用框架:Torch 7):1. 相关论文:Human-level control through deep reinforcement learningCODE链接(需翻墙)另外的链接(不需要翻墙):kuz/DeepMind-Atari-Deep-Q-Learner实现的算法名...
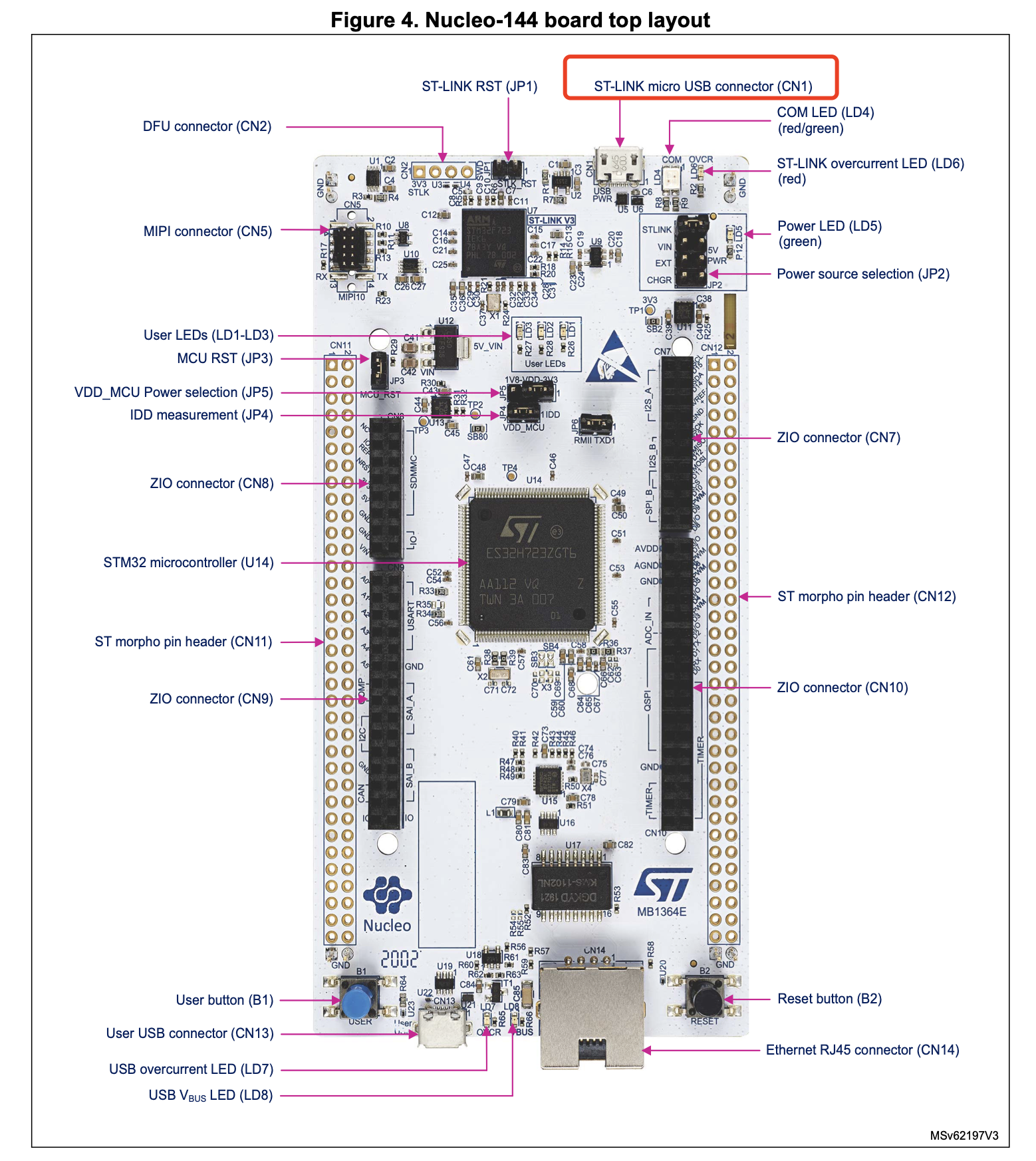
手册地址:https://www.st.com/resource/en/user_manual/um2407-stm32h7-nucleo144-boards-mb1364-stmicroelectronics.pdf。
转自维基:https://en.wikipedia.org/wiki/Bhattacharyya_distance在统计中,Bhattacharyya距离用于度量两个概率分布的相似性。它与Bhattacharyya系数密切相关,后者是两个统计样本或总体之间重叠量的度量。两项措施均以1930年代在印度统计研究所工作的统计学家Anil Kumar Bhattacharya的名字命名。[1]该...
Real-ESRGAN提供了如下几种不同的预训练模型: RealESRGAN_x4plus, RealESRNet_x4plus,RealESRGAN_x4plus_anime_6B, RealESRGAN_x2plus, realesr-animevideov3, realesr-general-x4v3。RealESRGAN_x4plus_anime_6B的毛发都是虚的。但是从光斑来说,Rea

有两篇博文,对自动驾驶的综述写的不错,自动驾驶决策控制及运动规划史上最详细最接地气综述,自动驾驶路径规划与行为预测最接地气详细综述美中不足的是,如果想要获取参考文献的话,需要付一些(不菲的)费用给作者,如果不想付费买paper的话,可以参考这两篇paper,paper中详细讲了自动驾驶决策相关的综述,以及它的参考文献,上面博文的参考文献也是差不多的,而且博文中也有很大一部分是借鉴的这两篇paper
详细解读DQN一. 强化学习1. 什么是强化学习问题?2. 强化学习的理论体系(1).MDPMarkov PropertyMarkov ProcessMarkov Decision Process(2).R(reward)R(reward)R(reward)(3). Value FunctionValue\ FunctionValue Function一. 强化学习1. 什么是
我将文章发表在了古月居,一起来看看吧!戳这里猜你想看:深度强化学习专栏 —— 1.研究现状深度强化学习专栏 —— 2.手撕DQN算法实现CartPole控制深度强化学习专栏 —— 3.实现一阶倒立摆pybullet杂谈 :使用深度学习拟合相机坐标系与世界坐标系坐标变换关系(一)Ubuntu助手 — 一键自动安装软件,一键进行系统配置...