




- @baidu_19356259
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
相机标定1.相机标定是什么2.怎么使用halcon进行相机内外参标定?(1)搭建硬件1.**相机连好电脑,用相机厂家软件打开相机,检查一下相机是否正常。**2.**接下来使用halcon连接相机**(2)开始标定1.**生成标定板参数文件**2.**配置标定参数**3.**开始标定相机****总结提取标志点失败原因4.**得到标定参数**(3)使用标定出的数据矫正图像1**相机畸变矫正**2**相
来源于http://blog.sina.com.cn/s/blog_d40acd530102xndm.htmlHalcon采相功能非常强大,基本支持各大品牌以及各个通信接口的相机,并且Halcon提供为相机厂商提供了制作Halcon相机接口库的办法,总之Halcon基本可以直接连接所有工业相机。但是Halcon连接相机采相存在两个问题:一是相机参数可调整范围有限,不如相机的SDK提供的可调...
// 转自 奥普特讲述工业相机与镜头分辨率匹配的技术方案随着机器视觉行业的发展,为了更好的满足广大客户选配合适镜头的需求,奥普特自动化科技有限公司为您简述工业相机如何选配合适的镜头,以及在相机与镜头的分辨率匹配方面的技术方案。一般在对相机与镜头选型时,在分辨率匹配方面,为了方便记忆镜头与相机的匹配关系,人们常采用对应相机的分辨率来命名镜头。这种命名方式其实并不科学,同时给新接触视觉系统的人...
1 halcon相机标定和图像矫正对于相机采集的图片,会由于相机本身和透镜的影响产生形变,通常需要对相机进行标定,获取相机的内参或内外参,然后矫正其畸变。相机畸变主要分为径向畸变和切向畸变,其中径向畸变是由透镜造成的,切向畸变是由成像仪与相机透镜的不平行造成的。(更多技术分享,请关注微信公众号:善眸科技;更多技术交流请加入qq机器视觉联盟群:1020941040)。针孔模型是理想透镜的成像模型,但
如下图,在旋转轴工具上放置一个Mark点,旋转角度,获得三个点,三点拟合圆,获得圆心坐标和旋转半径(默认已经做完九点标定,这三个点转为世界坐标后再计算圆心坐标和旋转半径)
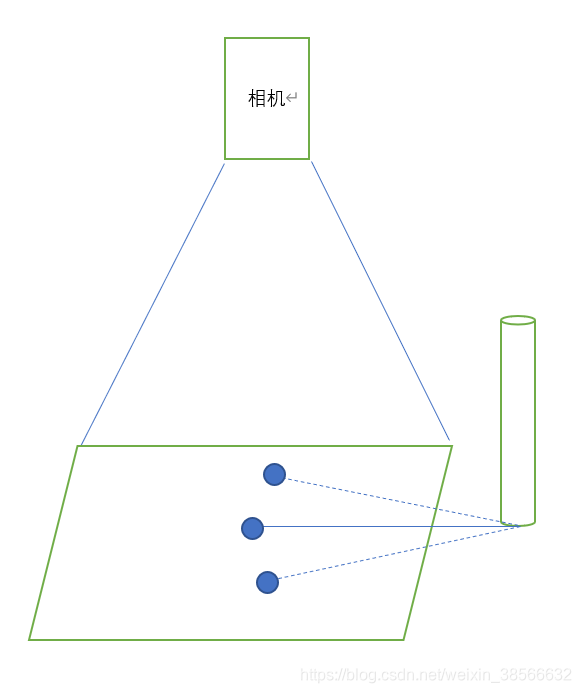
为什么需要九点标定?为了得到机械和相机的关系,就好比人的手和眼的关系。我们用手将一个物体放到空间的一个位置,用眼看到这个物体,这也存在两个坐标系,一个是手所在的运动空间的坐标系,一个是视网膜上成像的二维平面坐标系。我们用眼看到一个物体,用手去拿,之所以能够准确地拿到这个物体,是因为我们的神经系统把这两个坐标系准确地关联好了。机械和视觉系统也是这样,相机对工作空间中的物体进行拍照,机械手要想准确地取
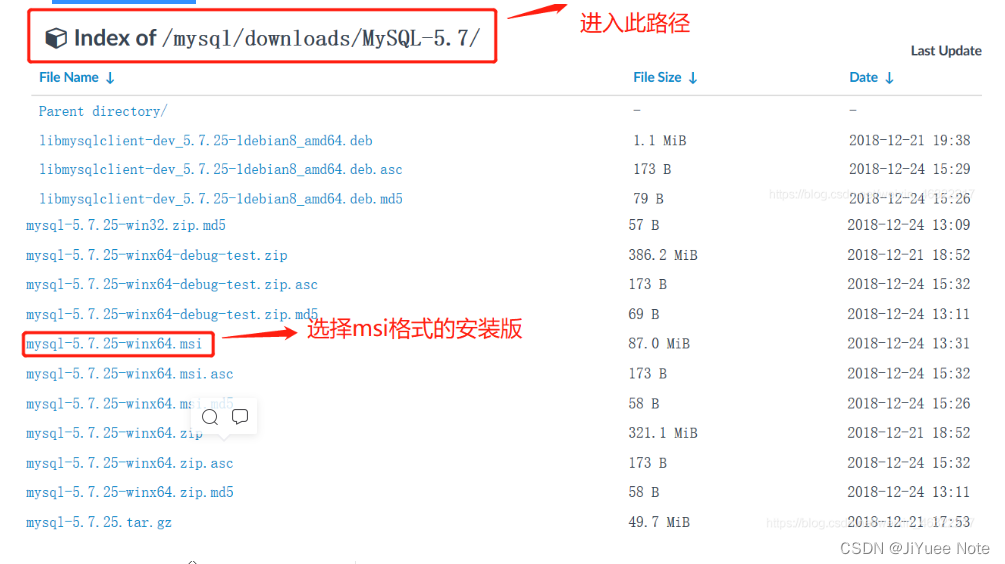
虚拟机windows7安装启动MYSQL5.7
1. 三个极的判定G极(gate)—栅极,不用说比较好认 S极(source)—源极,不论是P沟道还是N沟道,两根线相交的就是 D极(drain)—漏极,不论是P沟道还是N沟道,是单独引线的那边2. N沟道与P沟道判别箭头指向G极的是N沟道 箭头背向G极的是P沟道3. 寄生二极管方向判定不论N沟道还是P沟道MOS管,中间衬底箭头方向和寄生二极管的箭头方向总是一致的:...