- @axPpcfNN
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
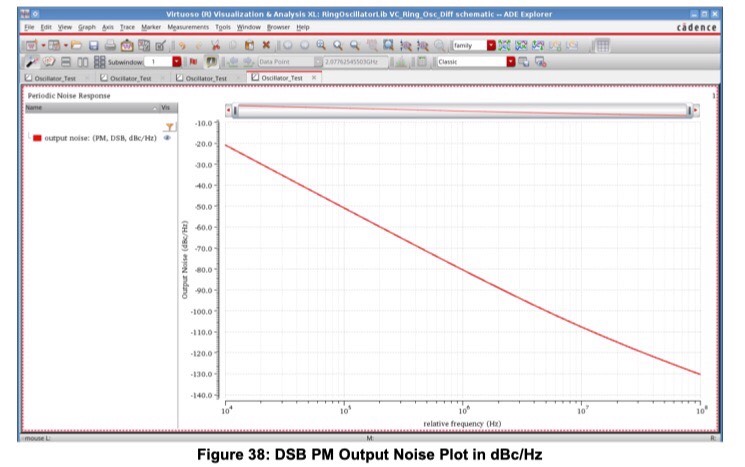
这里有个坑:tstab参数必须给够,我一般设振荡周期的20倍以上,不然起振波形能给你整出心电图效果(别问我怎么知道的)用smic55工艺跑3GHz时,全NMOS结构功耗能飙到15mW,但相位噪声能压到-95dBc/Hz@1MHz。会送一份一千多页的ADE_XL的User Guide,2018年,IC6.1.8。有四种经典不同结构的环形振荡器实际电路,工艺是smic55nm。[3]另外,最后会送眼图
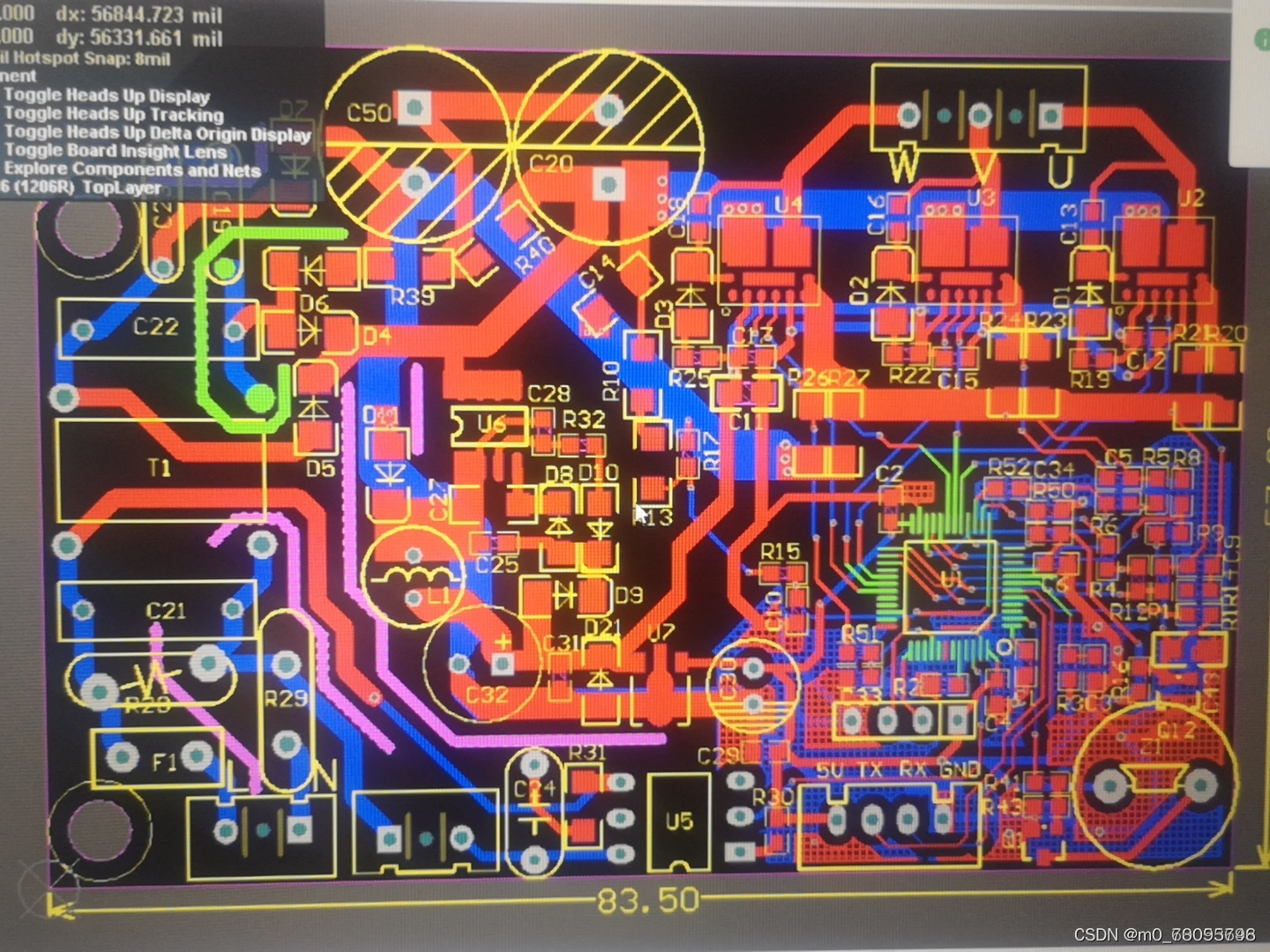
无叶风扇的驱动方案里藏着不少有意思的技术细节,咱们今天就扒一扒基于HC32F030主控的无感FOC驱动实现。先说说这主控芯片,HC32F030的PWM模块支持中心对齐模式,这对三相电机的对称控制特别友好。实际调试中发现,如果采样点没卡准PWM的波谷位置,电流波形会有明显毛刺,这个坑可是让不少新手栽过跟头。无叶风扇驱动器方案,主控芯片hc32f030,无感foc驱动,电流环,速度环控制,顺逆风启动控
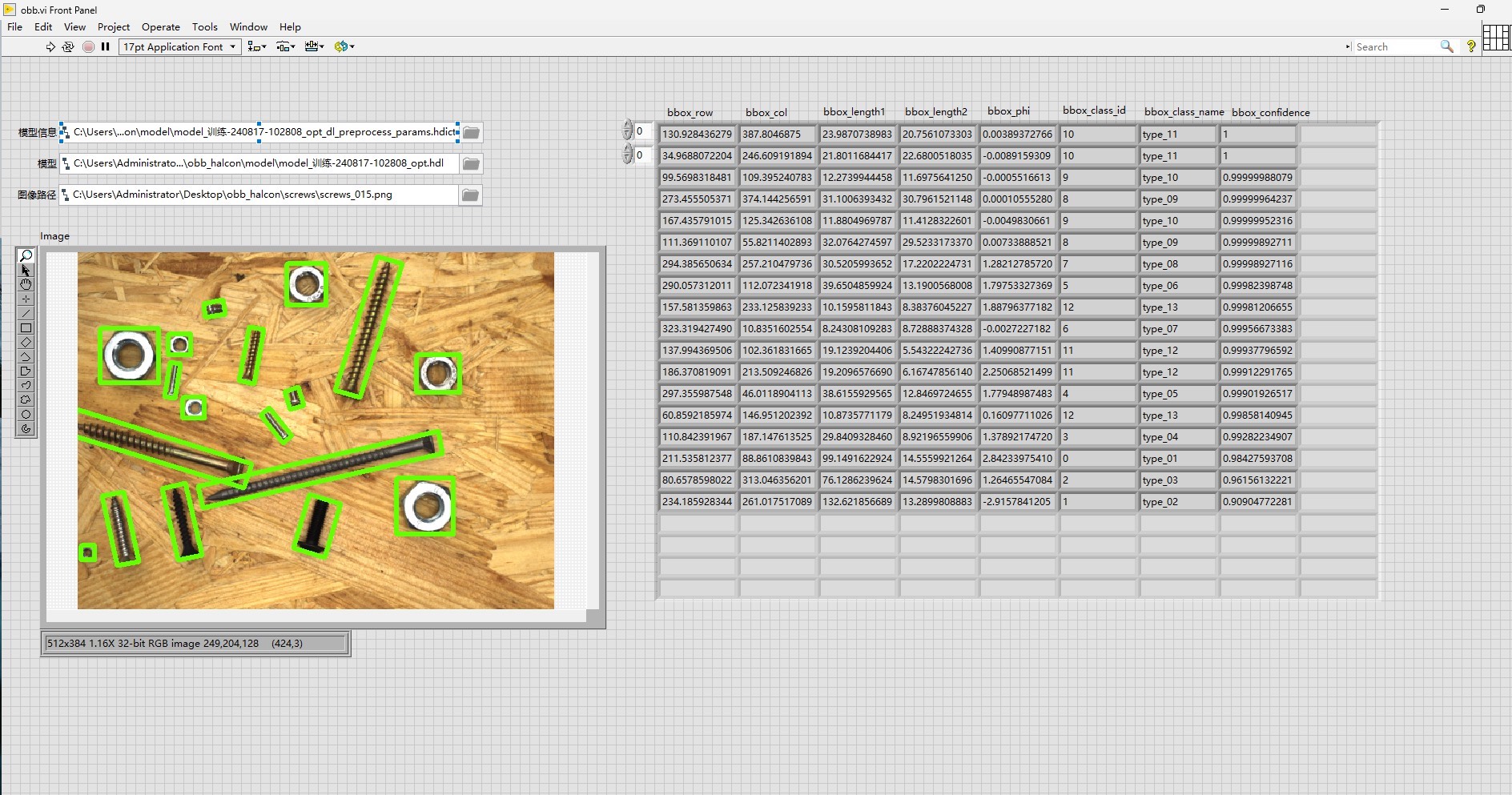
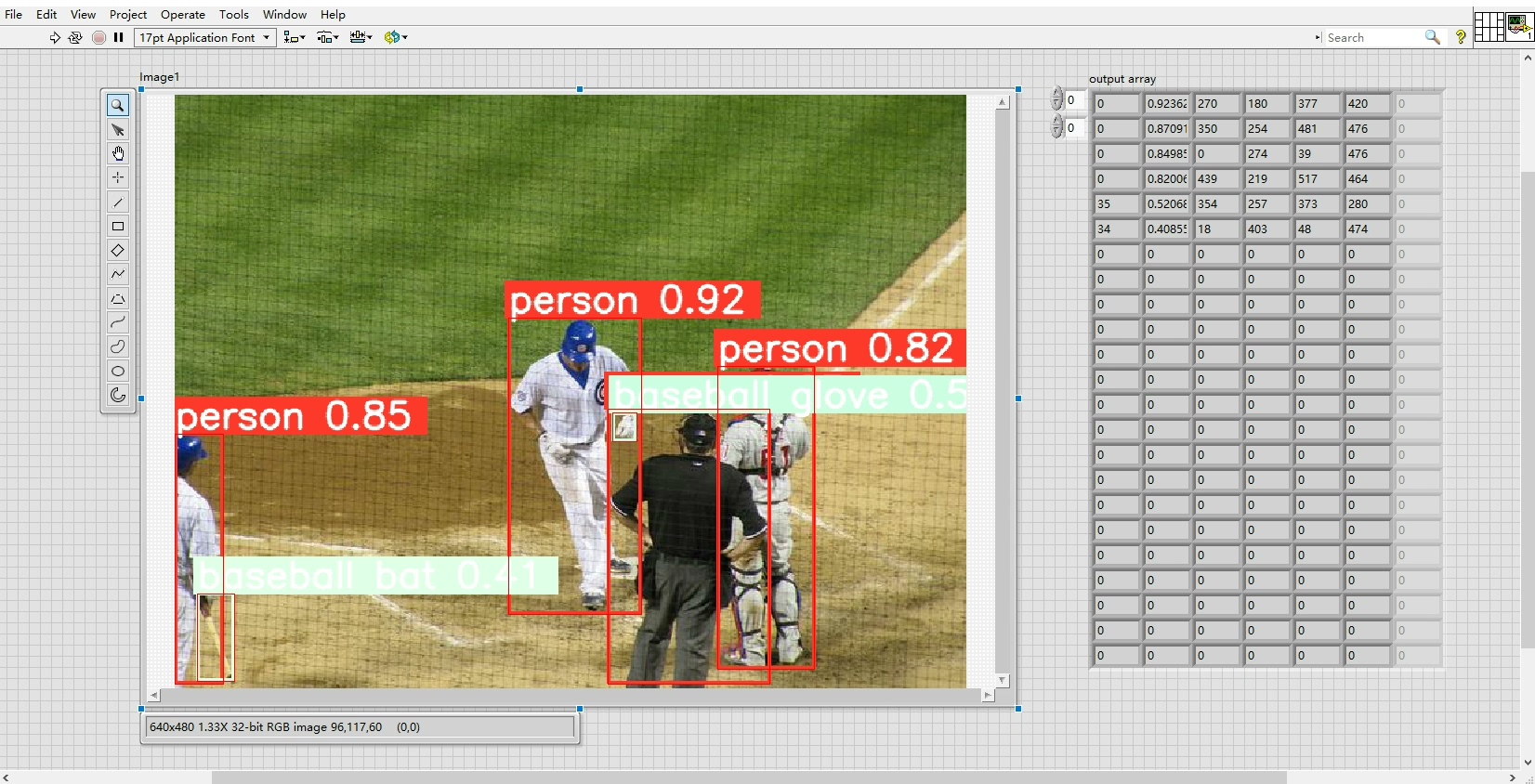
labview调用halcon实现目标检测-obb,源码,labview2018 64位,halcon22.05,里面包含模型和测视集最近在搞目标检测相关项目,发现LabVIEW调用Halcon实现目标检测 - OBB(Oriented Bounding Box,定向边界框)这个组合挺有意思,今天就来跟大家分享一下具体实现过程。咱们用的是LabVIEW 2018 64位版本,搭配Halcon 22
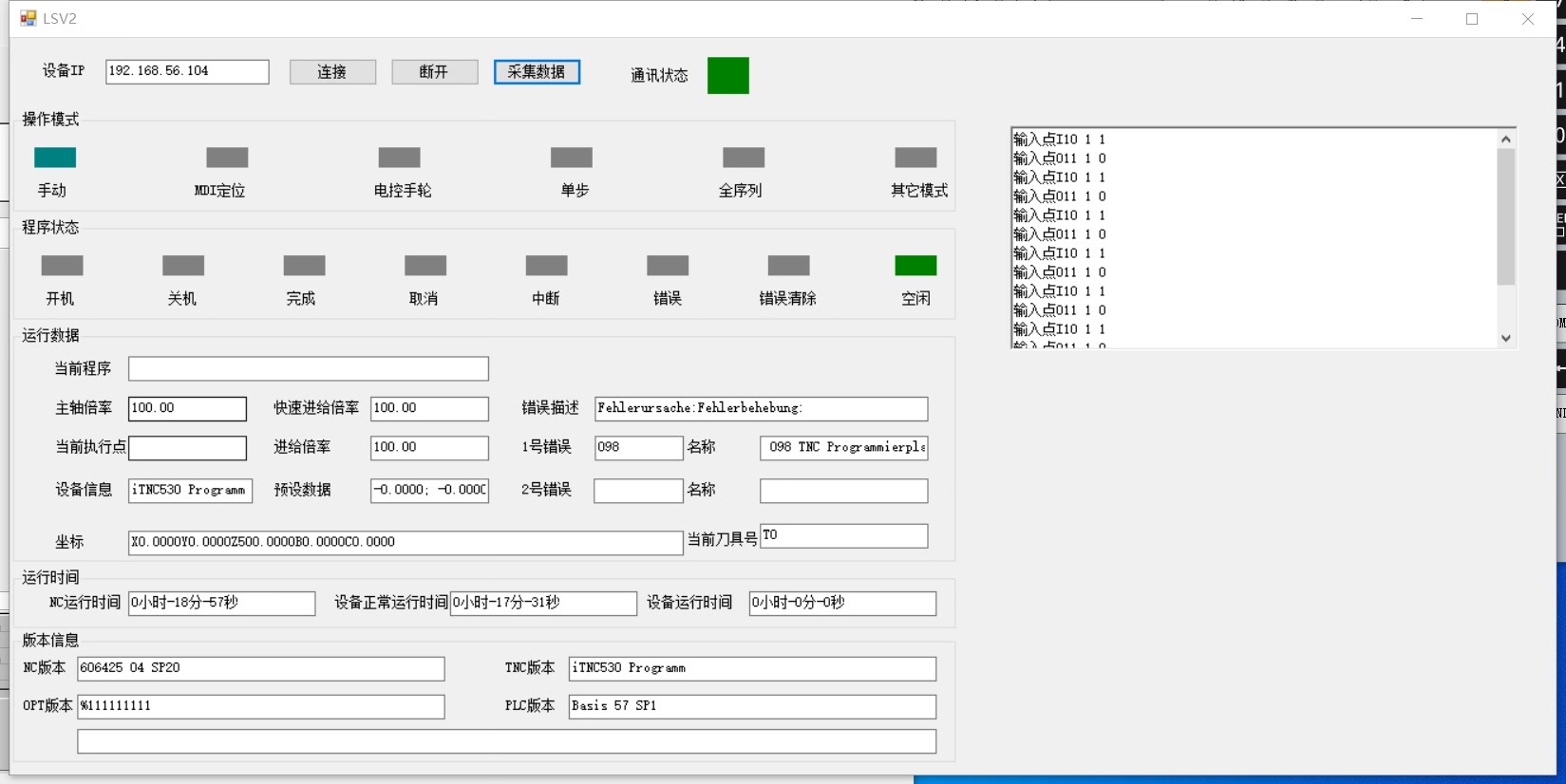
这段校验算法差点让我翻车——异或运算完必须转成两位十六进制,海德汉的协议文档里这细节就藏在某个脚注里。比如要获取当前坐标值,发个"1110"指令过去,设备会返回带校验的ASCII字符串。建议用生产者-消费者模式搞个数据缓冲区,机床运动时的数据流能到每秒上百条,直接往数据库怼分分钟撑爆连接池。注意数值要除以1000转换单位,之前有兄弟直接存原始值被车间主任骂惨了——程序显示0.5毫米,实际机床动的是
锁相环这玩意儿在电力电子里算是基本功了,最近在STM32G431上折腾了个基于SOGI+DQ结构的数字锁相方案。重点在DQ变换后的d轴分量直接反映相位误差,这个设计让频偏补偿变得直观——误差信号进PI调节器直接修正SOGI的内置角频率。这里的_Q15宏是把浮点数转成Q15格式,STM32G431没FPU硬核,用定点数运算能避免软浮点库拖慢速度。(SOGI+DQ)程序用stm32G431芯片写的(h
LabVIEW搞视觉项目总被人说是"小儿科",但这次咱用YOLOv5+ONNXRuntime整了个活——视频/图像目标检测框架,CPU/GPU随意切换,x86/x64通吃,还能多个模型同时开跑。labview yolov5目标检测onnxruntime推理,封装dll,labview调用dll,支持同时加载多个模型并行推理,可cpu/gpu, x86/x64位,识别视频和图片,cpu和gpu可选,
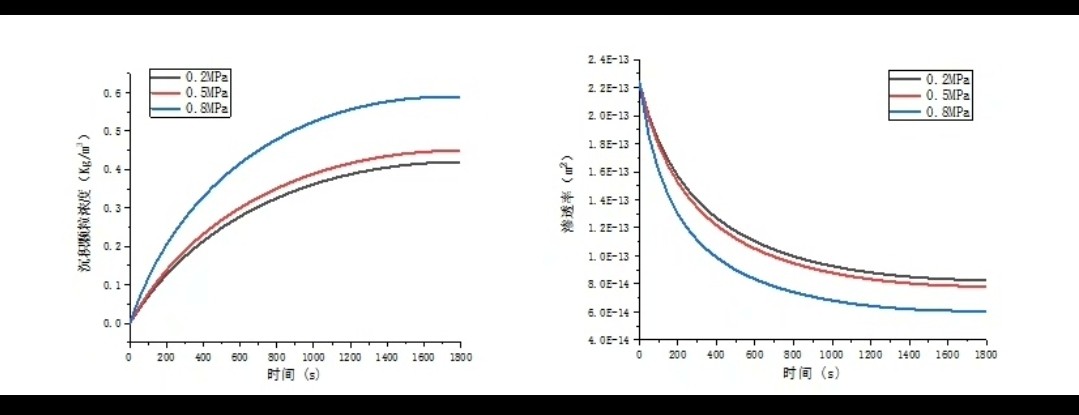
这个研究是基于魏建平的《裂隙煤体注浆浆液扩散规律及变质量渗流模型研究》。在这个研究里,考虑不同注浆压力,进行各种压力下的注浆封堵模拟。结果发现,沉积颗粒浓度会随着注浆压力增大而变大,而渗透率呢,恰好跟它呈负相关。这背后的原理其实挺有意思的,想象一下,压力越大,更多的颗粒被“挤”进了裂隙,慢慢地就会堵住一些通道,导致渗透率下降。
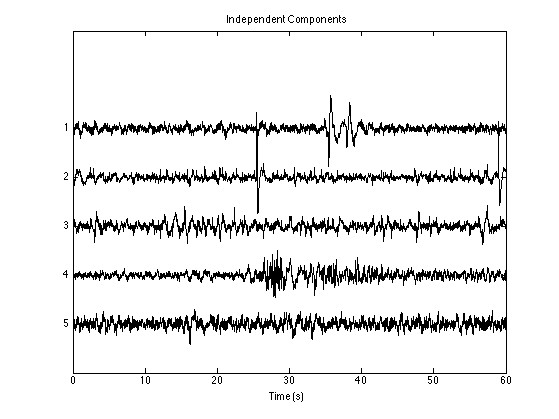
小波域独立分量分析(ICA)总带着点玄学色彩,但今天咱们换个角度,直接掀开代码看门道。nAngs=32意味着把小波滤波器的方向拆成32个角度,nScls=12则是搞了12层不同尺度的滤波器组。建议可视化混合信号的时频图和分离后的分量对比,特别是注意在信号交汇处是否有鬼影残留。有时候调大angSigma到0.3,虽然理论上的角度分辨率下降,但实际效果反而更干净,这大概就是玄学实践超越理论的时刻吧。这
锂枝晶的仿真就像在微观世界架设多台高速摄像机。某次对比实验里,流场涡旋导致枝晶生长速度出现13%的偏差,这误差刚好等于楼下咖啡店拉花失败的概率。C++程序,基于元胞自动机法模拟枝晶生长,能实现任意角度(偏心正方算法),同时采用LBM考虑了对流作用对枝晶生长的影响。C++程序,基于元胞自动机法模拟枝晶生长,能实现任意角度(偏心正方算法),同时采用LBM考虑了对流作用对枝晶生长的影响。锂枝晶生长过程的
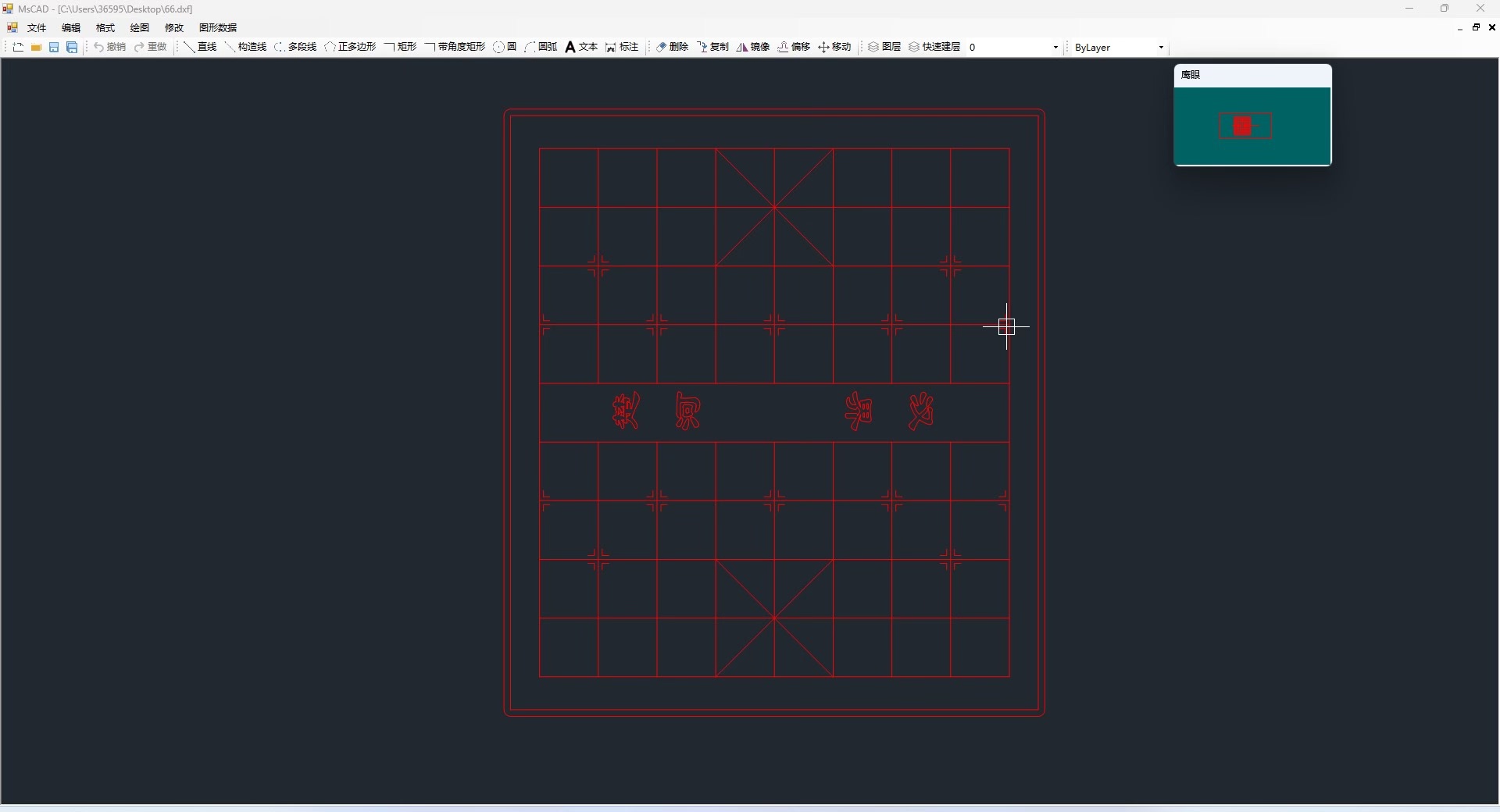
用C#撸了个解析器,能读取圆、直线、弧、多段线这些基础图形,顺手还做了G代码导出功能。这里用了个flag标记来捕获坐标对,因为DXF的顶点坐标是交替出现的。处理旧版POLYLINE更麻烦,得在顶点段(VERTEX)里逐个抓点,最后还要等SEQEND结束符,代码能多写二十行。不同版本组码有变化,比如圆弧的起始/终止角度在R12用50/51,新版可能用其他组码。DXF的坐标对总是成对出现,处理时要记得