




- @a571338923
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
本文介绍了AUTOSAR架构中的ComM组件功能及配置经验。ComM位于通信服务层,封装底层通信控制,简化用户操作。文章详细解析了ComM的五大核心功能:总线通信简化、多组件协调、通信禁用API、通道状态机控制及PNC网络集群支持。重点阐述了ComM的三种主要通信模式(NO/SILENT/FULL)及其子状态转换逻辑,以及管理通道与被管理通道的引用关系配置要求。通过状态机图和功能表格直观展示了Co
本文介绍了CP AUTOSAR架构下的EcuM组件功能及应用经验。EcuM负责ECU状态管理,位于System Services层,主要实现ECU初始化、休眠/关机状态管理、唤醒事件处理等功能。文章详细阐述了EcuM的模块依赖性、模式/状态/阶段概念,重点分析了STARTUP、UP等阶段的运作机制。EcuM通过与BswM、SchM等模块协作,完成BSW模块初始化、状态切换和唤醒处理,其灵活性需要集
本文介绍了CP AUTOSAR架构下的NvM组件配置经验,基于S32K312芯片和Vector工具链。NvM作为MemoryServices层的关键模块,负责非易失性数据管理,通过MemIf访问FLASH/EEPROM。文章详细阐述了NvM的基本架构、存储对象类型(NV/RAM/ROM/管理块)及三种块管理类型(NATIVE/REDUNDANT/DATASET),并提供了配置参数示例说明NvM与底
摘要: 本文介绍了CP AUTOSAR架构下的BswM组件,基于S32K312芯片和Vector工具链(DaVinci Configurator/Developer)的配置经验。BswM作为基础软件(BSW)中的模式管理模块,负责模式仲裁与模式控制,协调SW-C及BSW模块(如EcuM、ComM、Dcm等)的状态切换。其核心功能包括:通过逻辑表达式(AND/OR/XOR等)评估模式条件,触发立即或
本文介绍CP AUTOSAR 架构下的CanNm组件,基于S32K312芯片、Vector提供的CBD包,使用DaVinci Configurator工具进行配置的经验。CanNm组件位于Communication Services层,上层为Nm,下层为CanIf,大多数情况下只与这两个组件交互。CanNm组件基于AUTOSAR标准实现ECU与ECU之间的网络管理。上图为CP AUTOSAR CA

本文介绍CP AUTOSAR 架构下的CanSM组件,基于S32K312芯片、Vector提供的CBD包,使用DaVinci Configurator工具进行配置的经验。CanSM组件位于Communication Services层,通常被ComM所调用。CanSM组件负责管理CAN总线的状态。上图为CP AUTOSAR CAN网络架构。
本文介绍CP AUTOSAR 架构下的CanTrcv组件,基于S32K312芯片、Vector提供的CBD包,使用DaVinci Configurator工具进行配置的经验。CanTrcv组件位于Communication Hardware Abstraction层,通常被CanIf所调用。CanTrcv组件负责管理ECU上的CAN收发器芯片。上图为CP AUTOSAR CAN网络架构。本文文字描
本文介绍CP AUTOSAR 架构下的CanTp组件,基于S32K312芯片、Vector提供的CBD包,使用DaVinci Configurator工具进行配置的经验。CanTp组件位于Communication Services层,是Can Interface的上层和PDURouter的下层。CanTp组件实现MCU的CAN数据流的拆分、重组、流控制等,即对CAN多帧进行组包拆包然后传给上层。
本文介绍CP AUTOSAR 架构下的Gpt组件,基于S32K144芯片、NXP提供的MCAL包,使用EB Tresos工具进行配置的经验,不具体介绍芯片定时器外设的功能。Gpt组件用来控制芯片上的定时器开关、获取定时器的值、触发定时器中断、触发定时器唤醒事件等,但芯片上不一定所有的定时器都是由Gpt控制,也有可能是Cdd控制。Gpt组件为其他组件提供时基,比如PWM、ICU、OCU。Gpt组件位
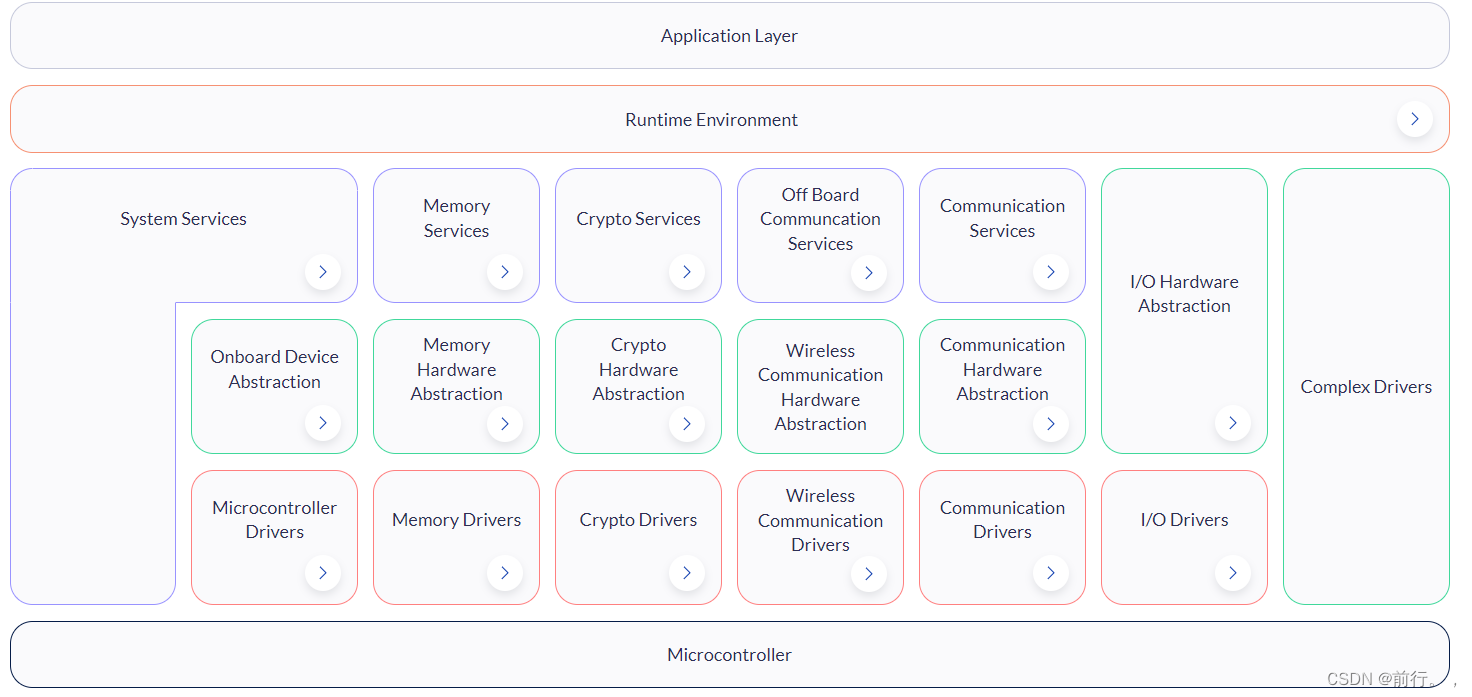
本文介绍CP AUTOSAR 架构下的MemIf组件,基于S32K312芯片、Vector提供的CBD包,使用DaVinci Configurator工具进行配置的经验。MemIf组件位于Memory Hardware Abstraction层里,是Fee和Ea的抽象层,NVRAM组件通过MemIf来访问Fee和Ea。上图为CP AUTOSAR存储架构。MemIf给上层组件NVRAM使用,总的来说