




- @YuhsiHu
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
许多用于训练的数据集很大,一般通过Google Drive进行分享,而出于磁盘容量和方便训练的考虑,这些数据我们一般放在服务器上,服务器没有图形界面,因此我们需要使用wget来进行下载。Google Drive的链接格式是这个样子的:https://drive.google.com/file/d/<fileid>/view我们要关注的是<field>,这相当于文件的编号。以
这章讲的是摄像机参数估计。
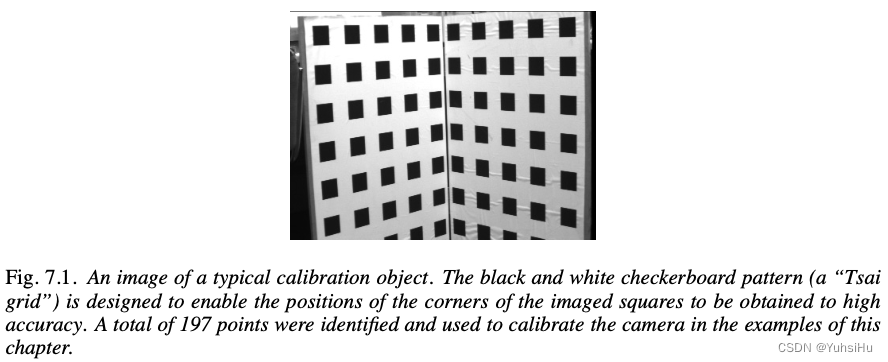
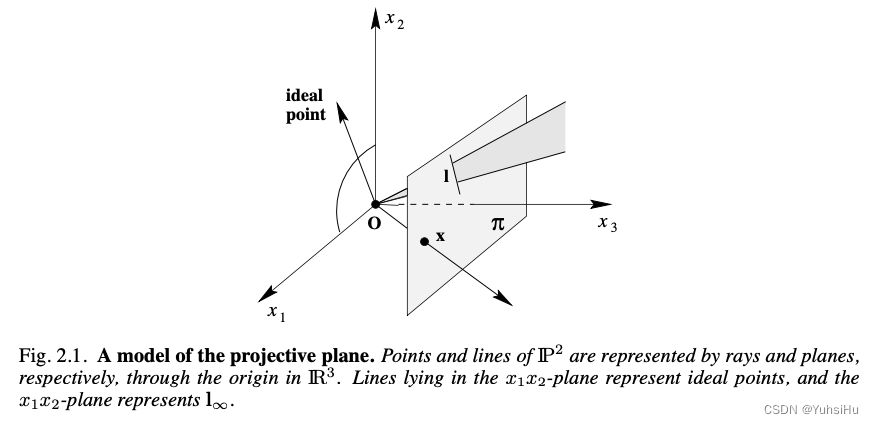
本章主要介绍必要的几何知识与符号。
这章讲的是摄像机参数估计。
许多用于训练的数据集很大,一般通过Google Drive进行分享,而出于磁盘容量和方便训练的考虑,这些数据我们一般放在服务器上,服务器没有图形界面,因此我们需要使用wget来进行下载。Google Drive的链接格式是这个样子的:https://drive.google.com/file/d/<fileid>/view我们要关注的是<field>,这相当于文件的编号。以
本文提出了一种基于visual relocalizer的新颖结构,从无位姿图像中恢复相机参数(姿态和内参)。不同于传统基于特征匹配的SfM(如COLMAP),作者将SfM过程重新解释为基于场景坐标回归 (Scene Coordinate Regression)的增量重定位问题。该方法能无需位姿先验、高效地从上千张图像中重建隐式场景表示,并能达到接近传统SfM的姿态估计精度,最终通过新视角合成验证其

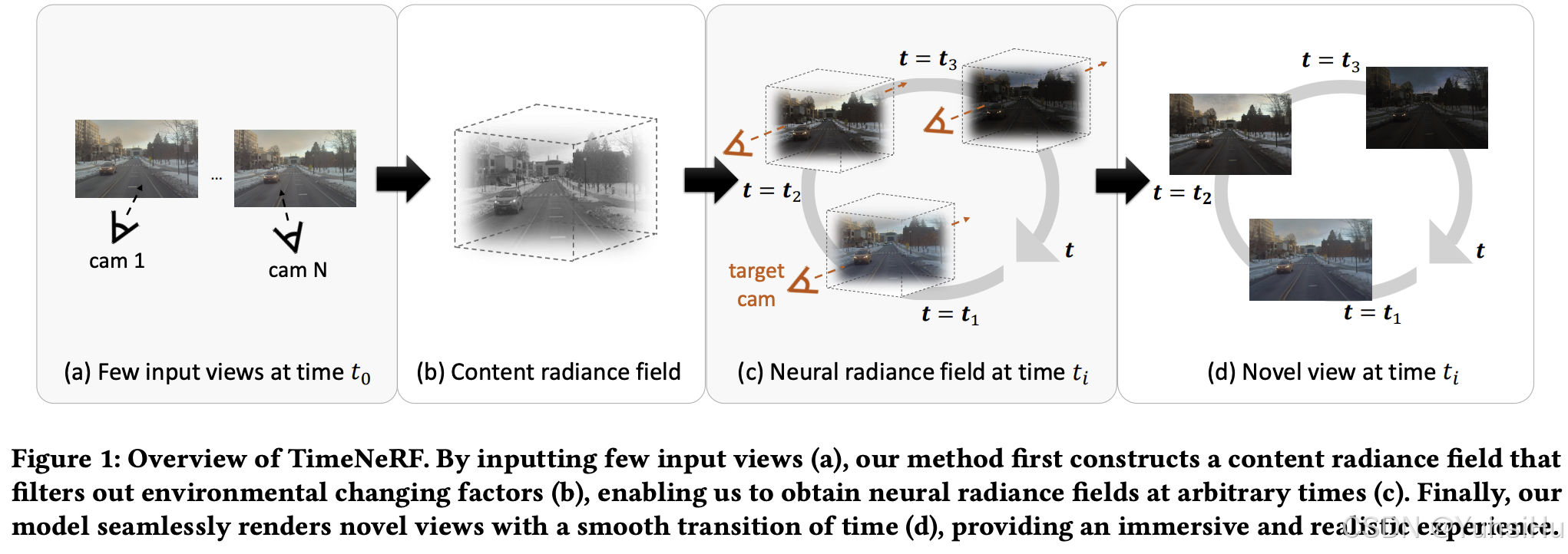
文章试图构建generalizable NeRF,并且sparse view的setting,能够合成在时间t的新视角。具体而言,希望能够在任意时间、任意视角合成新视图的通用神经渲染方法,尤其在只有少量输入视图的情况下仍能表现优异。该方法针对当前 NeRF 技术难以处理时间动态变化和少样本泛化的问题,提出一种结合多视图立体视觉、神经辐射场、内容-环境解耦的新型框架,能够在无需针对每个场景重新优化的
NeRF论文精读
