- @XvjeLeOxlZ
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
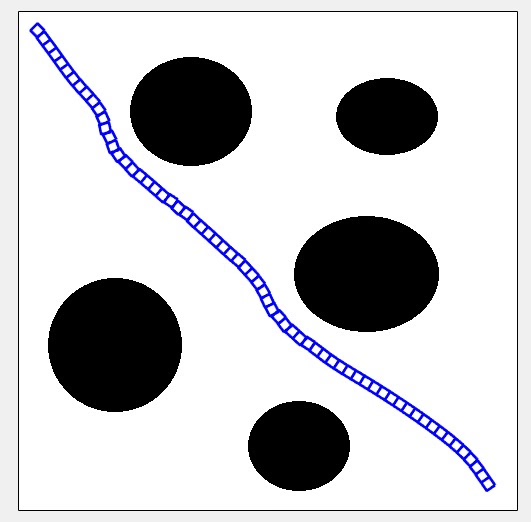
通过模糊逻辑,我们可以让机器人或无人机在复杂环境中做出更智能的决策。虽然这个示例代码比较简单,但通过修改地图和坐标信息,可以很容易地将其扩展到更复杂的应用场景。希望这篇博文能给大家带来一些启发!
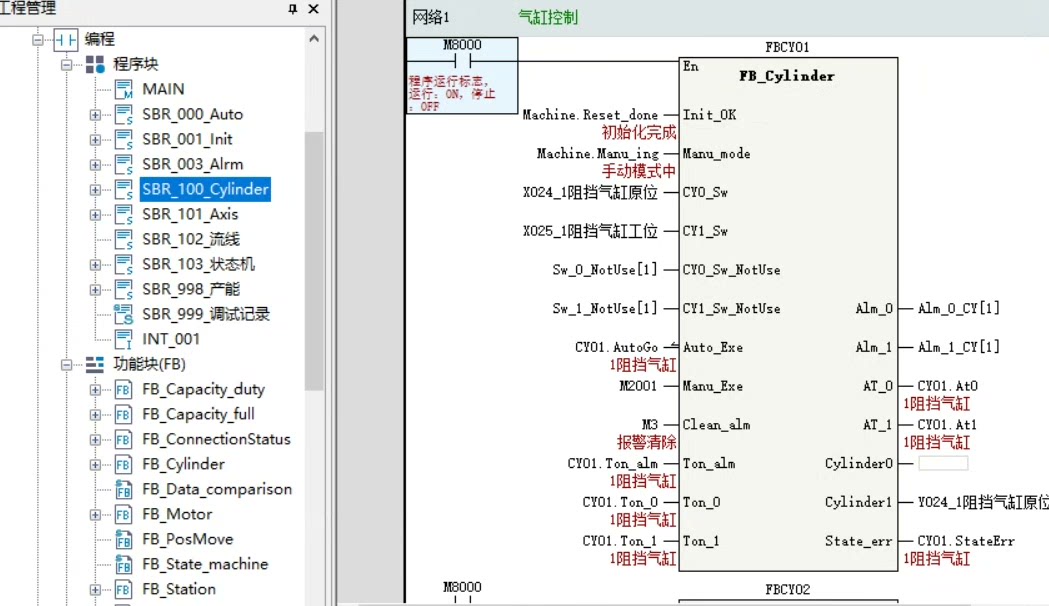
这个框架最大的亮点就是全开源且无加密,意味着我们可以随心所欲地查看、修改和复用代码。它基于汇川H5U和EASY系列PLC进行开发,封装了多个基础功能块以及外围设备功能块。这些功能块的封装,就像是搭建积木一样,大大降低了开发的难度,让初学者也能快速上手,同时也为有经验的开发者提高了开发效率。
通过模糊逻辑,我们可以让机器人或无人机在复杂环境中做出更智能的决策。虽然这个示例代码比较简单,但通过修改地图和坐标信息,可以很容易地将其扩展到更复杂的应用场景。希望这篇博文能给大家带来一些启发!
不过别高兴太早,真实工况还要考虑磨头磨损——在仿真里添加了工具磨损模型后,发现每20个工件就需要修正一次TCP位置,Z轴补偿量约0.12mm。今天带大家玩转工业机器人的曲面抛光黑科技,手把手教你在虚拟环境里调教出完美的自动化抛光方案。四个附加的小仿真实验报告里有个有趣发现:在路径重叠率设置实验中,40%的重叠率相比常见的30%能让工具寿命延长1.8倍。Robot studio仿真,工业机器人自动抛

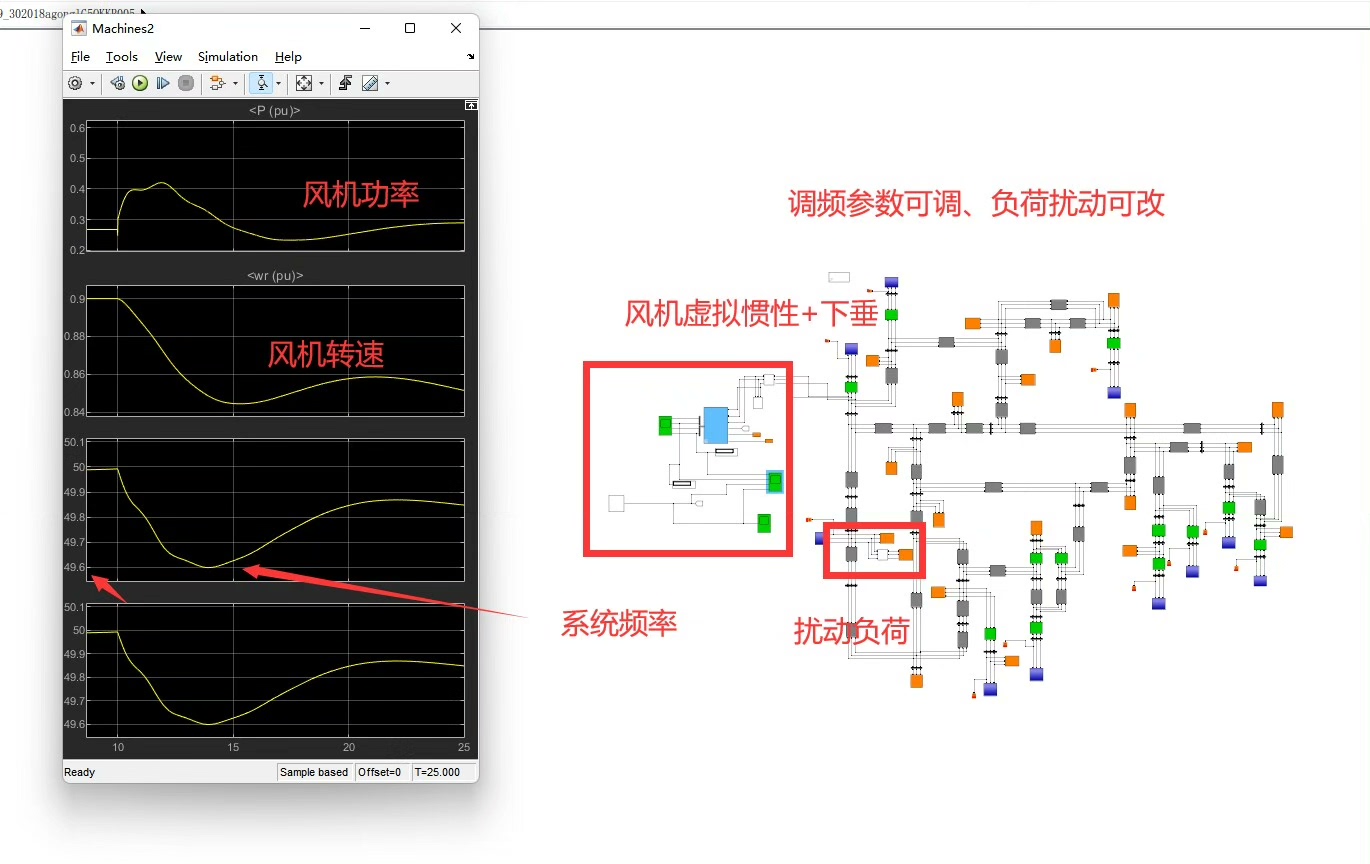
某次仿真中遇到过这样的情况:当系统惯量降低到临界值时,DFIG的相位会出现持续的低频振荡,这时候就得考虑附加阻尼控制了。IEEE39节点系统,10机39节点,新英格兰39节点,并网双馈风机DFIG可进行潮流计算,风电并网短路故障分析等,机电暂态分析,发电机功角稳定分析。IEEE39节点系统,10机39节点,新英格兰39节点,并网双馈风机DFIG可进行潮流计算,风电并网短路故障分析等,机电暂态分析,
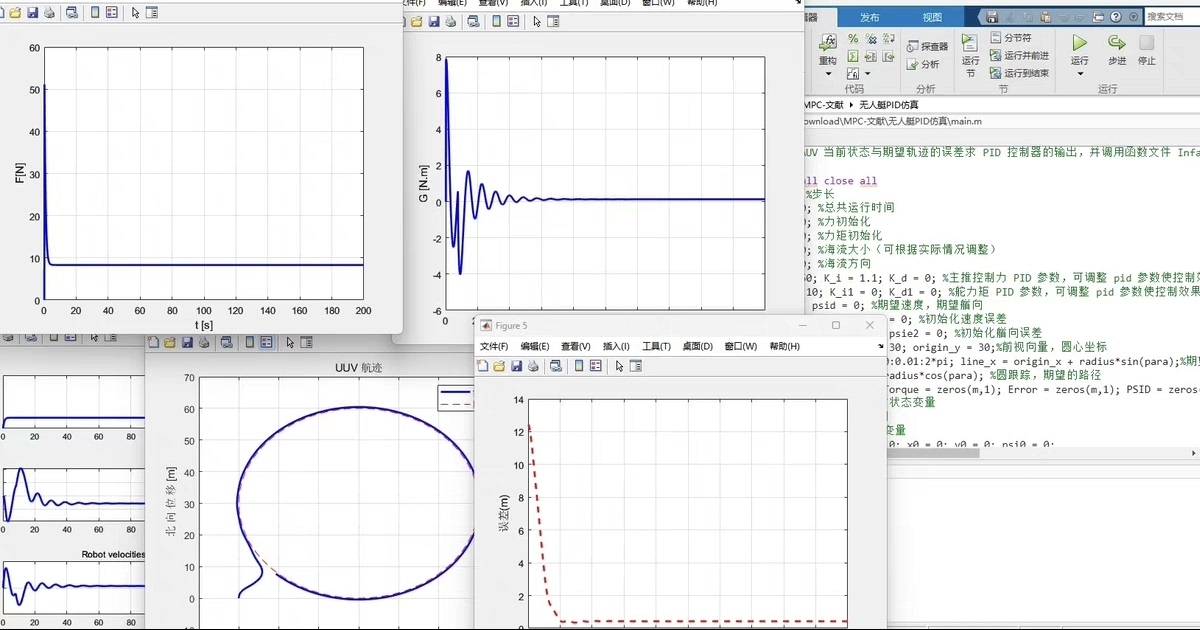
通过本文的增量PID控制仿真,我们看到了该算法在无人船轨迹跟踪中的优良性能。随着AI技术的进步,未来的智能水下机器人控制将会更加智能化和自动化,为人类探索海洋世界提供更强大的工具。
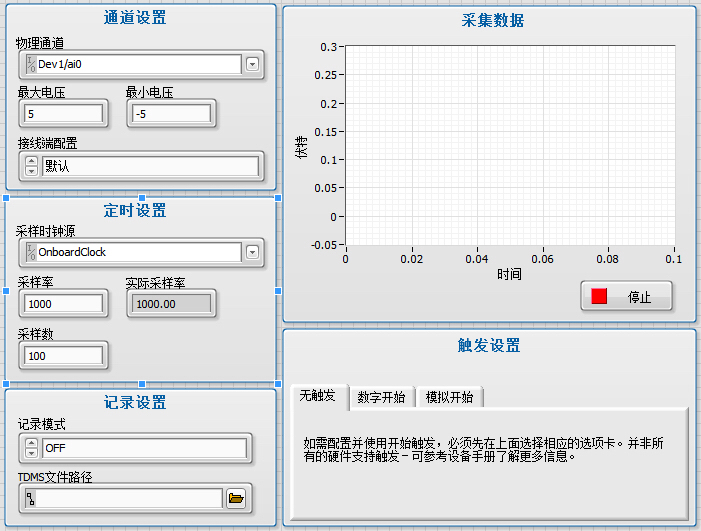
搞工控的兄弟们都清楚,数据采集是自动化系统的基本功。先说硬件配置,现场随便抓个NI的USB-6009之类的采集卡,接上变送器就能开工。想要玩点花的,试试把Y轴刻度改成自动调整,配合属性节点实现动态缩放,现场演示效果绝对能让甲方爸爸眼前一亮。注意数组索引从0开始还是从1开始,LabVIEW的索引习惯和C语言系不太一样,容易栽跟头。包括压力,温度,液位,转速,扭矩等模拟量信号的采集,和数据处理~图表显
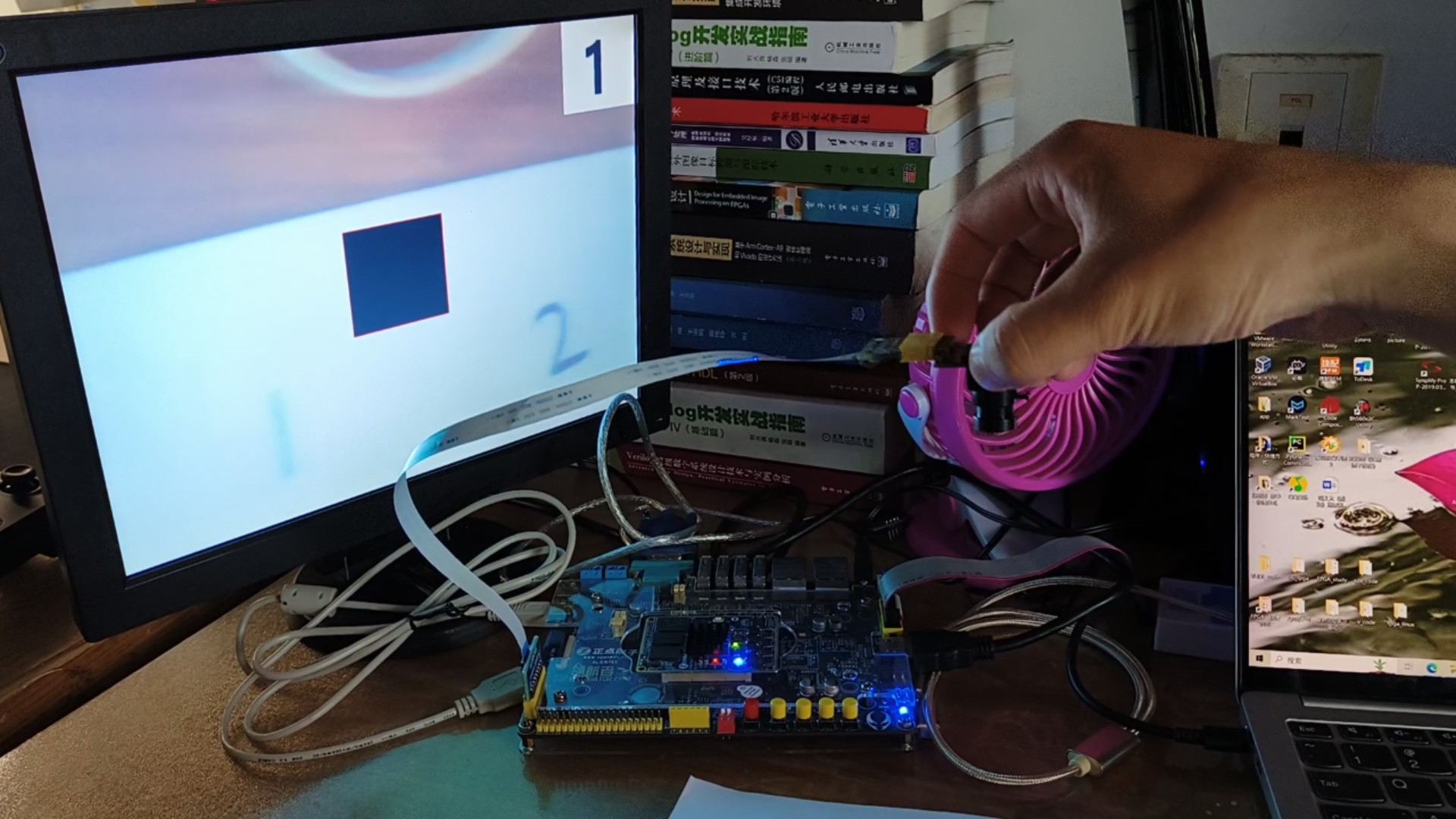
工程移植到其他板子时,最烦人的是摄像头和显示屏的引脚分配。从OV7725摄像头抓图到HDMI实时显示,FPGA和ARM两个核心分工明确得就像火锅店前厅后厨的配合——一个管火候,一个管摆盘。这行代码里的魔法数字可不是随便凑的,77、150、29这三个系数是人眼对不同颜色敏感度的量化值,比简单取平均讲究多了。在此工程的基础上,可以适配到正点原子的其他开发板上,也可以继续在FPGA端加速卷积神经网络。在
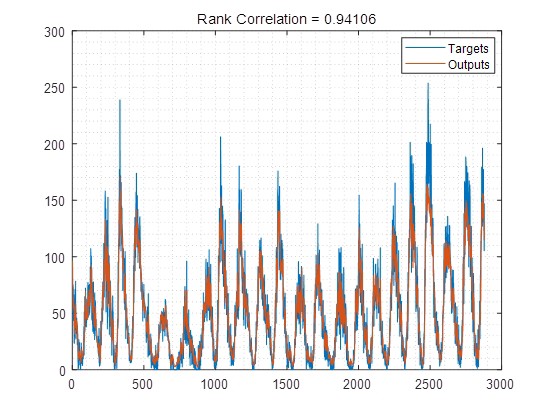
就拿预测下个月机票价格来说,要是能把过去十年每个月的客流数据喂给模型,让它自己琢磨规律,这事儿就成了大半。试过航空旅客预测任务,单元数少于150的时候,模型在节假日客流突变的地方总掉链子。包括国际航空旅客人数预测、全球冰储量预测、感染水痘人数预测、极紫外光预测、事故预测和240年的太阳黑子预测。包括国际航空旅客人数预测、全球冰储量预测、感染水痘人数预测、极紫外光预测、事故预测和240年的太阳黑子预
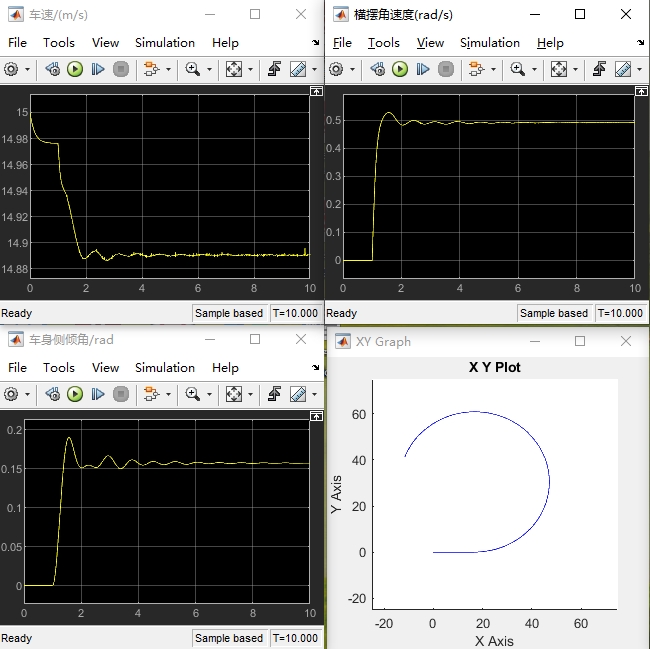
→包含模块:转向系统,整车系统,悬架系统(十四自由度才有),魔术轮胎pac2002,车轮系统,PI驾驶员模块等。→包含模块:转向系统,整车系统,悬架系统(十四自由度才有),魔术轮胎pac2002,车轮系统,PI驾驶员模块等。适用场景:采用模块化建模方法,搭建7自由度和14自由度整车模型,作为整车平台适用于多种工况场景。→十四自由度包含:整车纵向,横向,横摆,车身俯仰,侧倾,垂向跳动,四轮旋转和垂向