- @XKuVhniPguQm
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
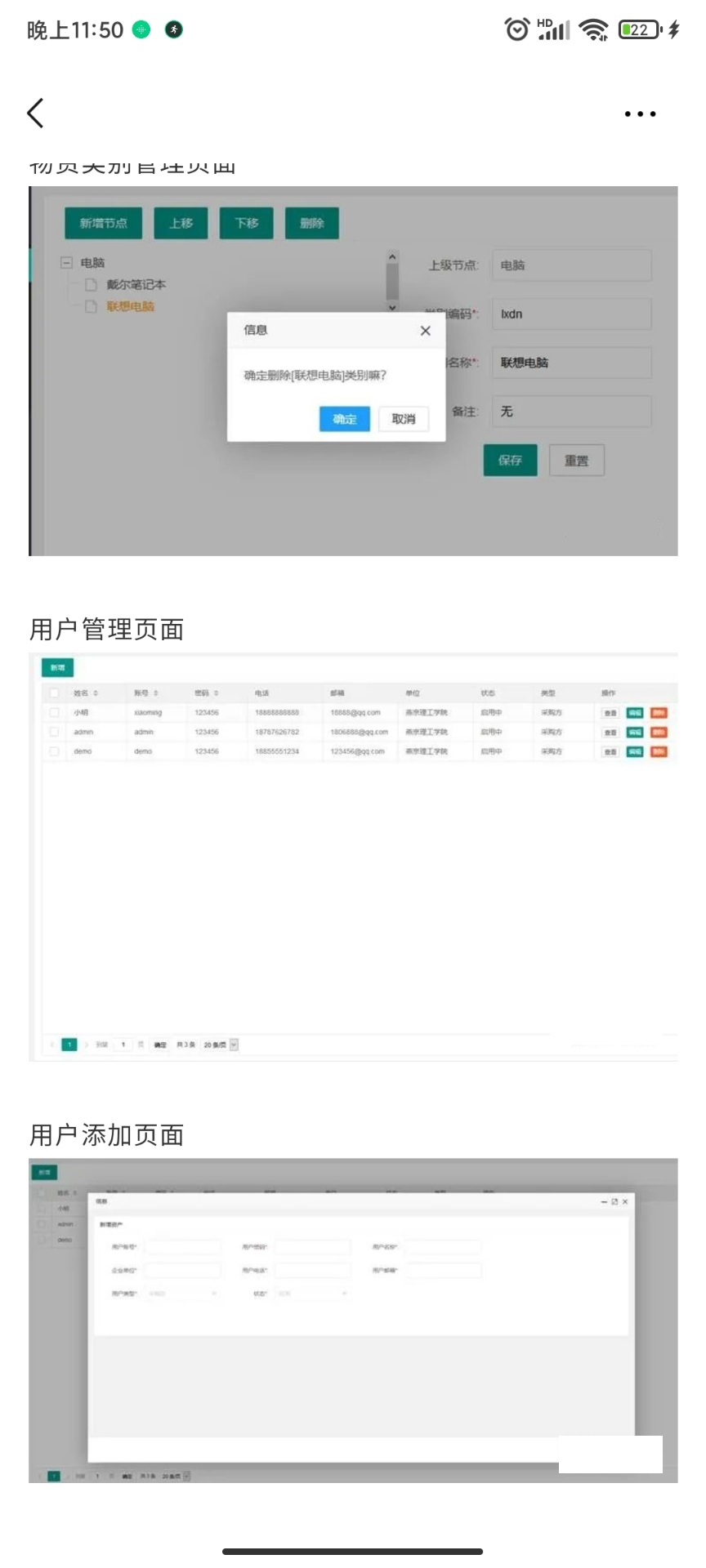
本项目主要用来把传统的采购招标流程迁移到线上,线上采购招标系统目的在于摒弃传统采购招标复制繁琐的流程、改善现有采购招标现状,将采购招标功能流程迁至线上,实现信息互通,远程完成整个采购招标流程。本项目主要用来把传统的采购招标流程迁移到线上,线上采购招标系统目的在于摒弃传统采购招标复制繁琐的流程、改善现有采购招标现状,将采购招标功能流程迁至线上,实现信息互通,远程完成整个采购招标流程。其中主要针对采购
WinCaps3的帮助文档是藏在安装目录下的CHM文件,但Win10/11默认会阻止这类文件打开。调试机械臂本身已经够头秃了,别再让软件安装消耗你的发量。官方给的安装包经常是多个版本的混合体,有次我手滑装了2021版驱动结果把2019的runtime搞崩了。最近在调试DENSO机械臂的时候,发现不少同行在WinCaps3的安装和授权环节翻车。今天就结合自己的踩坑经验,聊聊怎么搞定这个工业机器人界的

只能识别正脸,侧脸低头戴口罩全歇菜光线影响很大,要是考勤机对着窗户,逆光根本抓不到脸戴隐形眼镜有时候识别率会下降(可能是我扒的ORL库戴眼镜的样本少?没有集成摄像头,只能拿拍好的图片测试抓脸的时候可以加个眼睛检测,确保是正脸降维之后可以加个LDA(线性判别分析),提升类间距离集成MATLAB的摄像头工具箱,实时抓脸实时识别加个Excel导出功能,记录考勤时间。
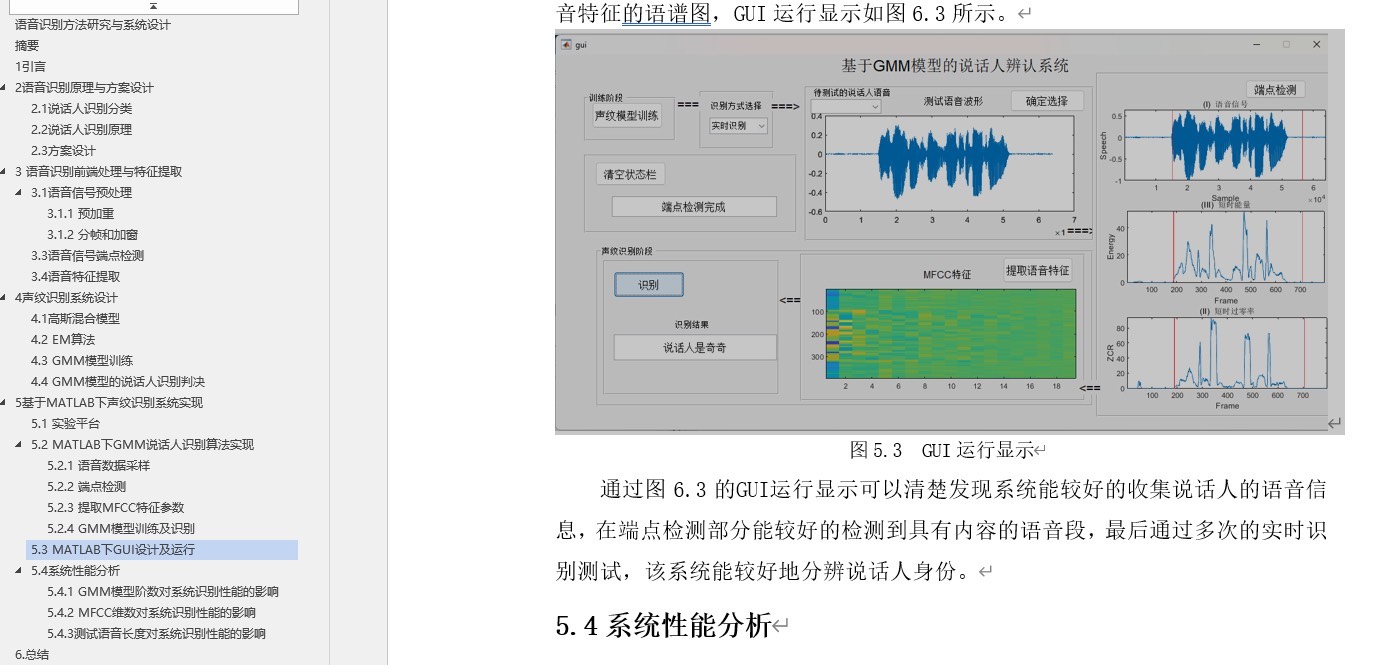
最后附上论文写作建议:实验部分重点对比不同GMM分量数的影响,用混淆矩阵展示易混淆说话人;参考文献务必包含经典的Rabiner语音处理教程和Reynolds的GMM说话人识别开山之作。注意取帧的FFT前半部分避免冗余计算,最后DCT变换压缩维度。今天就带大家实操基于GMM模型的方案,重点说说特征提取、模型训练这两个核心环节,顺带展示下如何用GUI做个可视化操作界面。对于语音数据,各维特征间相关性不
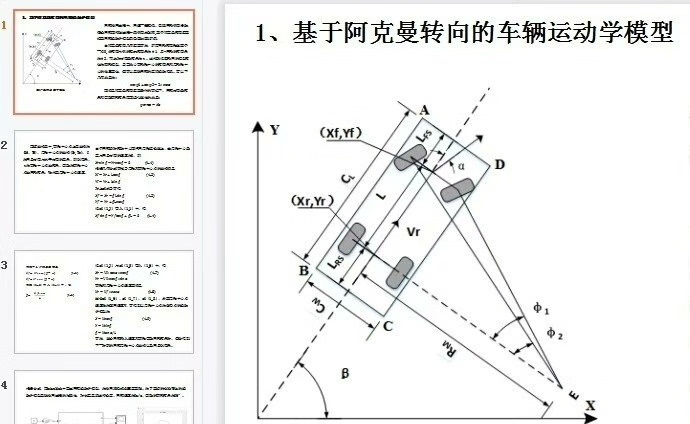
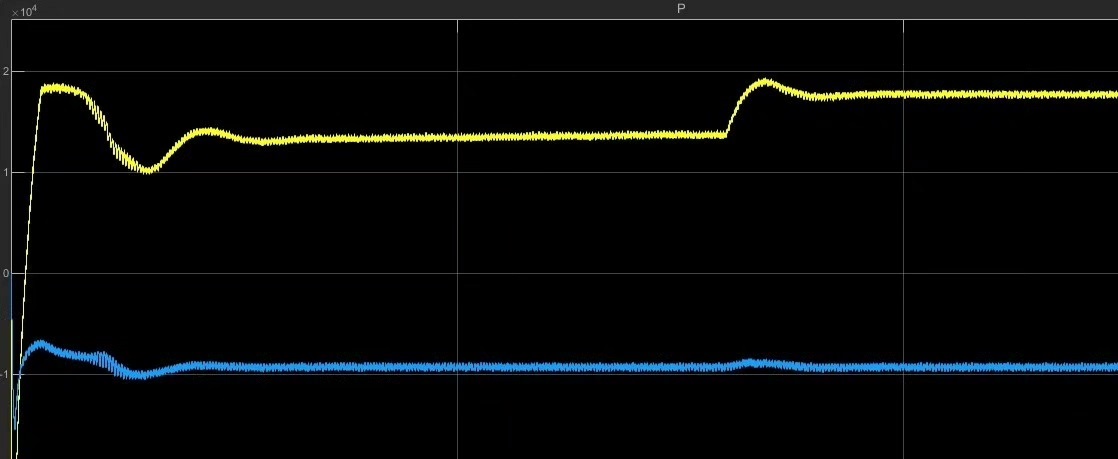
这个模型的精妙之处在于,当你在键盘上吃着薯片做仿真时,它能让你直观看到车辆像真人驾驶那样出现侧倾甩尾的物理现象。从Scope里抓取的信号曲线显示:横摆角速度响应比二自由度模型延迟0.2秒(侧倾惯性的锅),而侧向加速度在0.6秒后出现明显波动——这是悬挂系统开始参与能量交换的特征。在Suspension模块里,用弹簧阻尼器组模拟侧倾刚度,当车身侧倾角phi超过3度时,悬挂行程限制器开始工作——这直接
整套模型跑起来后,建议先用恒压源代替光伏阵列调试控制环路,等电流环电压环都稳定了再接入真实的MPPT控制。有个坑要注意:电网电压不平衡时,记得在PLL前加个正序提取环节,不然锁相结果会抽风。光伏并网系统的建模总能让电力电子爱好者兴奋起来,今天咱们来拆解一个典型的光伏并网模型。这个系统核心就三件事:怎么把光伏板榨出最大电量,怎么把直流电变成交流电,怎么让这个交流电乖乖并入电网。实际调试时得配合示波器
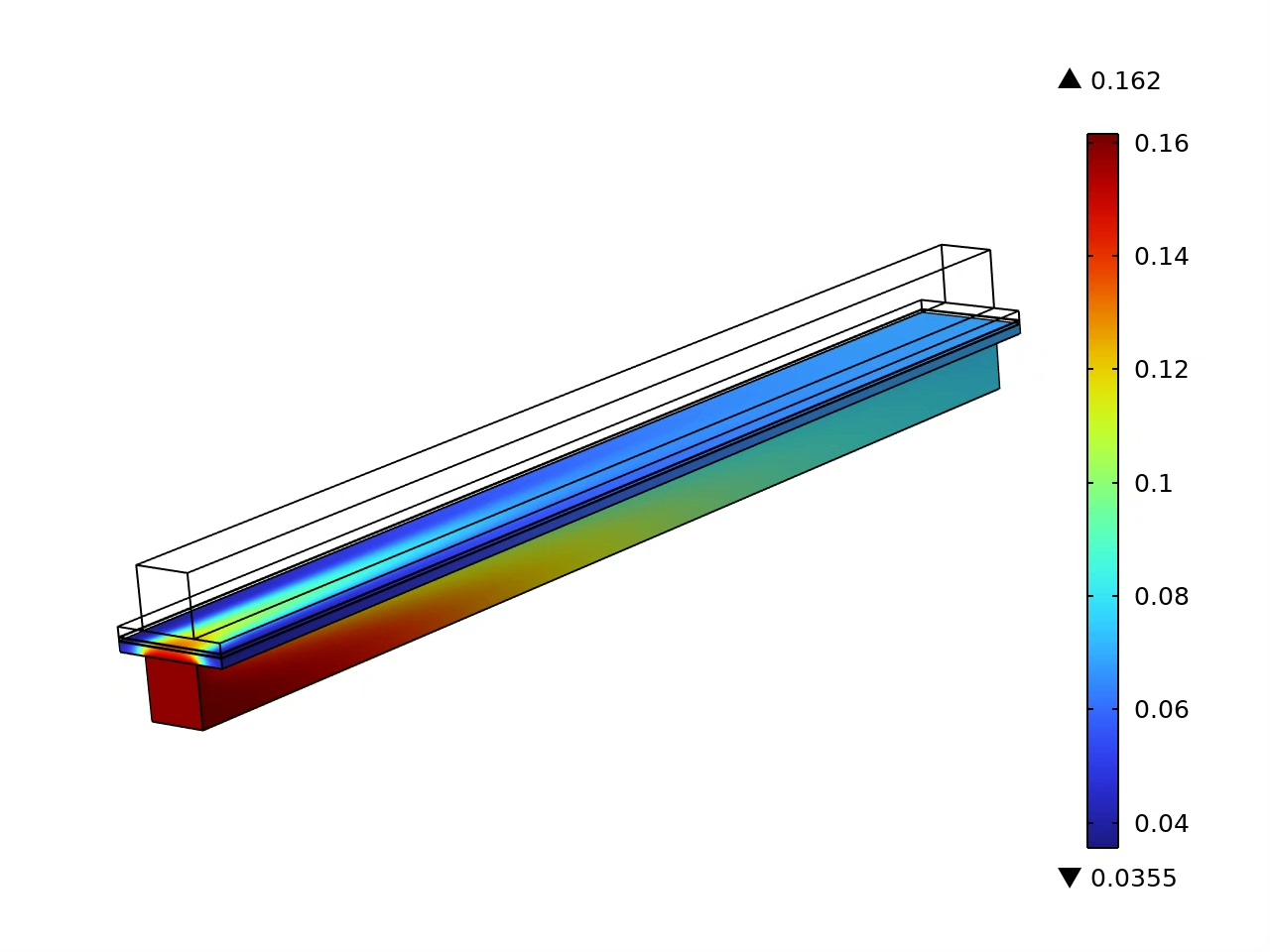
这玩意儿不仅能分析多孔介质的孔隙率和渗透率,还能看看这些因素对极化曲线和水活度分布的影响。通过改变孔隙率和渗透率,我们可以得到不同的极化曲线,从而分析这些参数对电池性能的影响。这段代码很简单,就是创建了一个模型,然后添加了多孔介质流动物理场,并设置了孔隙率和渗透率。PEM/AEM燃料电池模型,耦合多孔介质流动物理场,可以分析多孔介质孔隙率,渗透率等因素对极化曲线,水活度分布的影响。PEM/AEM燃
最后附上论文写作建议:实验部分重点对比不同GMM分量数的影响,用混淆矩阵展示易混淆说话人;参考文献务必包含经典的Rabiner语音处理教程和Reynolds的GMM说话人识别开山之作。注意取帧的FFT前半部分避免冗余计算,最后DCT变换压缩维度。今天就带大家实操基于GMM模型的方案,重点说说特征提取、模型训练这两个核心环节,顺带展示下如何用GUI做个可视化操作界面。对于语音数据,各维特征间相关性不
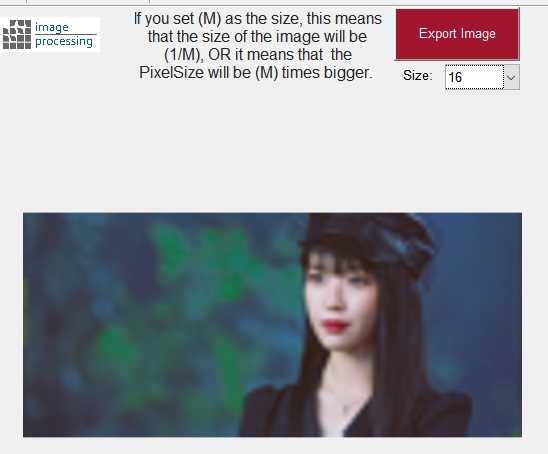
不过码代码最爽的时刻,还是看到imshow弹出处理前后对比图的那一瞬间——像素级的操作直接视觉化反馈,比纯理论推导带劲多了。建议新手多玩imtool函数,实时观察像素值变化,比看十篇论文都有用。这里fullfile自动处理路径拼接,比字符串拼接优雅多了。Image histogray灰度直方图显示,分水岭图像分割,gamma变换,直方图均衡化。Image histogray灰度直方图显示,分水岭图
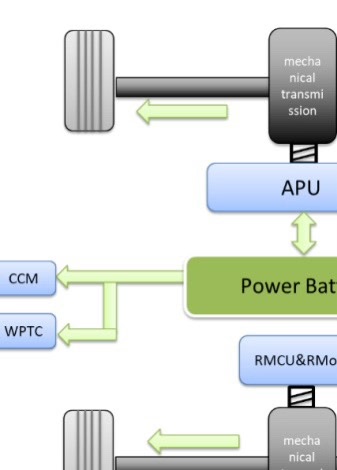
就像魔术师的手帕,既要完成后台复杂的能量调度,又要在前台保持丝滑的驾驶体验。新能源汽车高压能量管理策略:根据整车能量需求,通过划分整车高压能量分配优先级,对整车能量进行分级管理,通过给出高压件工作使能命令及可用功率或者扭矩限值,让车辆在不同工况下实现高压能量流的合理分配。新能源汽车高压能量管理策略:根据整车能量需求,通过划分整车高压能量分配优先级,对整车能量进行分级管理,通过给出高压件工作使能命令