




- @TJMtaotao
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
基于 OpenClaw 框架,你可以利用其“技能插件化”架构和“自我进化(self-evolution)”模块,实现课程开发的半自动化乃至全自动化迭代。自我进化插件:安装 self-evolution 技能,该技能允许智能体定期扫描自身生成的课程内容与代码,对比最新行业标准或用户反馈,自动提出改进方案3。子代理嵌套:将课程分为多个独立模块(如文本讲义、视频脚本、练习题库),每个模块启动一个子代理并
由于多尺度特征融合的有效性能,路径聚合 FPN (PAFPN) 被广泛应用于 YOLO 检测器中。然而,它不能有效地、自适应地同时集成高层语义信息和低层空间信息。我们在本文中提出了一种名为 MAF-YOLO 的新模型,它是一种新颖的目标检测框架,具有多功能颈部,称为多分支辅助 FPN(MAFPN)。在 MAFPN 中,浅层辅助融合(SAF)模块旨在将骨干和颈部的输出结合起来,保留最佳水平的浅层信息

目前最先进的目标检测网络依赖于区域建议算法来假设目标的位置。SPPnet[1]和Fast R-CNN[2]等技术的发展减少了这些检测网络的运行时间,使区域建议计算成为瓶颈。在这项工作中,我们引入了一个区域建议网络(RPN),它与检测网络共享完整的图像卷积特征,从而实现几乎无成本的区域建议。RPN是一个完全卷积的网络,它同时预测每个位置的对象边界和对象得分。RPN通过端到端的训练来产生高质量的区域建
Borui Jiang∗1,3, Ruixuan Luo∗1,3, Jiayuan Mao∗2,4,Tete Xiao1,3, and Yuning Jiang41School of Electronics Engineering and Computer Science, Peking University2ITCS, Institute for Interdisciplinary Inf...
ASFF它学习了空间过滤冲突信息以抑制不一致性的方法,从而提高了特征的尺度不变性,并引入了几乎免费的推理开销。详细原理和工程代码可参考另外一篇博文:https://blog.csdn.net/TJMtaotao/article/details/103216377代码如下:import torchimport torch.nn as nnimport torch.nn.funct...
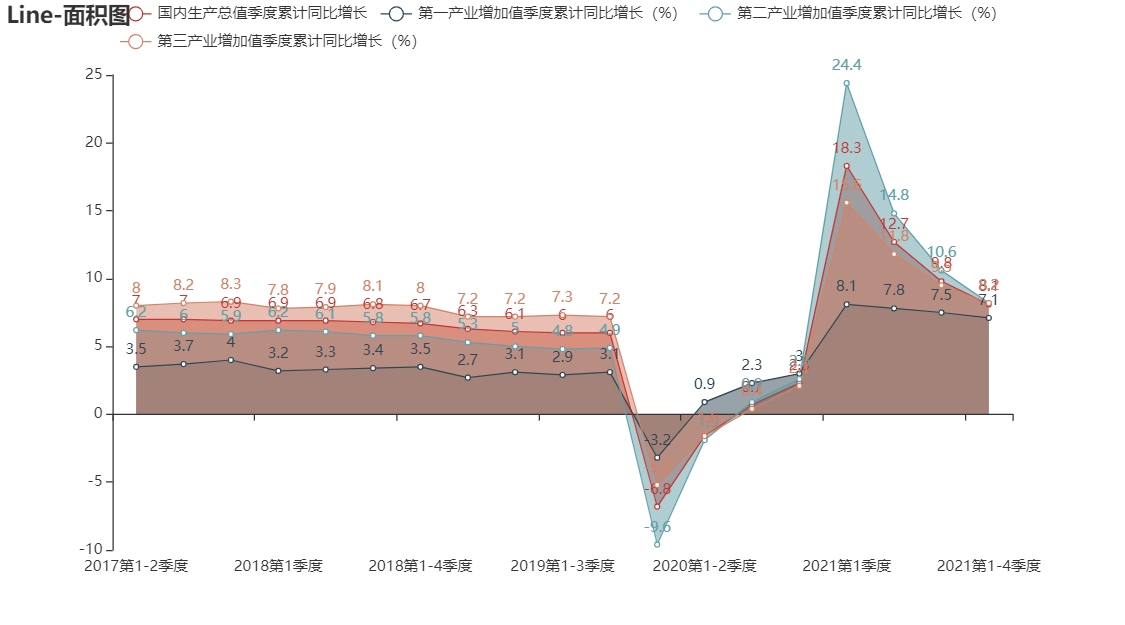
数据来源:数据详情_ 数据_中国政府网import pandas as pddata = pd.read_excel('GDP.xls')序号 统计时间 国内生产总值(亿元) 国内生产总值季度累计同比增长(%) 第一产业增加值(亿元) 第一产业增加值季度累计同比增长(%) 第二产业增加值(亿元) 第二产业增加值季度累计同比增长(%) 第三产业增加值(亿元) 第三产业增加值季度累计同比增长(%)0
ASFF它学习了空间过滤冲突信息以抑制不一致性的方法,从而提高了特征的尺度不变性,并引入了几乎免费的推理开销。详细原理和工程代码可参考另外一篇博文:https://blog.csdn.net/TJMtaotao/article/details/103216377代码如下:import torchimport torch.nn as nnimport torch.nn.funct...
Songtao LiuBeihang Universityliusongtao@buaa.edu.cnDi HuangBeihang Universitydhuang@buaa.edu.cnY unhong WangBeihang Universityyhwang@buaa.edu.cnhttps://github.com/ruinmessi/ASFF/blob/master/...
目前最先进的目标检测网络依赖于区域建议算法来假设目标的位置。SPPnet[1]和Fast R-CNN[2]等技术的发展减少了这些检测网络的运行时间,使区域建议计算成为瓶颈。在这项工作中,我们引入了一个区域建议网络(RPN),它与检测网络共享完整的图像卷积特征,从而实现几乎无成本的区域建议。RPN是一个完全卷积的网络,它同时预测每个位置的对象边界和对象得分。RPN通过端到端的训练来产生高质量的区域建