
写文章




- @TANG_HAO_JIE
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
如何在Linux系统使用ROS调用CAN总线
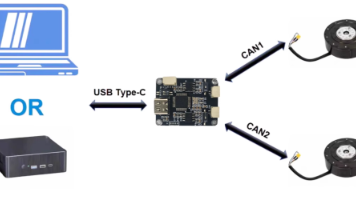
本教程基于SOULDE-Studio/USB2CAN_ROS仓库代码编写,主要面向需要在ROS环境下进行CAN总线通信的开发者。我们将使用肥猫机器人公司的USB2CAN模块和SOULDE-Studio开发的USB2CAN_ROS软件包作为示例。使用USB2CAN_ROS软件包可以大大简化CAN总线通信的开发工作,让我们能够通过ROS的标准接口来发送和接收CAN消息。USB2CAN_ROS支持同时连
ENCOS 电机调试小工具:USB2CAN 因克斯电机调试工具登场
配合USB2两路CAN模块,此工具可实现设置零点、查询电机ID、重置电机ID、设置电机ID、查询电机通信模式、进行力位混合控制模式电机控制、读取电机反馈,同时支持定时发送控制数据。* 电脑版只需要用浏览器打开即可使用,适用于windows 、Linux及Mac OS平台。* 手机版需配合usb调试助手app及Edge浏览器使用,适用于Andriod平台。
到底了