




- @Sineey223
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
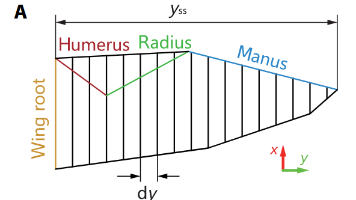
Flapping-wing robot achieves bird-style self-takeoff by adopting reconfigurable mechanisms (西工大)需要做仿真,因此要建立快速气动模型。用的是strip theory; blade element theory:The strip theory (or blade element theory) is a
另外建立了尾的气动模型并通过仿真设计控制律,成功应用在样机上[14,15].(别人这里模型也建了,控制也设计了。b的可能假设是:在螺旋桨之后,气流是先收缩、后扩散的(滑流)一般地,螺旋桨的滑流区可分为近场区和远场区[105-106],对于 THUTS005 尾坐式无人机,由于机翼与螺旋桨相距较近,本文假设机翼全部处于螺旋桨滑流的近场区,即只考虑螺旋桨滑流的收缩效应而不考虑扩散效应。有疑问,有来流时
1. 扑翼的控制自由度选择为膜张紧程度的控制有四方面的问题需要搞清楚:1. 扑翼的控制自由度选择为膜张紧程度的控制关注:(1)具体的舵效是多大,试验测试。(2)更关注对该舵效是如何建模的。参考文献:曹姐的气动预测模型,东哥的文章文档,程总的实验;其他类似构型,想必也有一些论文可以参考。可能没有前飞工况的,看可否推广过去。(这个可以靠后,因为前两个文档我都有,而且这个我也不一定用,建议最后整理)曹姐
2. 机构的组成是怎样的(简单看看,知道有哪些构件即可)发现,两个啮合齿轮(单自由度,单电机驱动),有两个三角形板,其中一个板和机架构成曲柄摇杆机构,另一个板也类似,只是1个本应固定的铰链悬浮在了空中;相对地,该板的一个自由铰也被通过弹簧链接在了另一个板的连杆上,这个弹簧应该就是积攒能量的。要建立该连杆系统的模型:腿部各(三角形)连杆的质心为 CoMi,质心到前一连杆末端的距离为 li,质量为 m
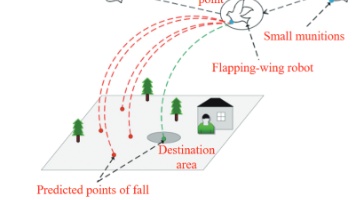
A Bio-Inspired Flapping-Wing Robot WithCambered Wings and Its Application inAutonomous Airdrop (仿生扑翼飞行器,带有弯度的翼)
或者,并行算法之类的。现在的顺序其实不太对,不应该这么频繁地修改dphi,所以应该是给定V和dphi。应该最先修改beta,这是最内层的遍历,然后再修改da,最外层再去修改dphi。是找给定V和dphi的组合下,有没有合适的beta da,满足配平条件。% 注意,为了能正常读取这里设置的输入,simulink中的constant模块不要赋值,而是在Value中填写这里的变量名。细化:比如,在可行的
要实现翼柔性变形的测量,采用非接触式的测量方法,目前主要有结构光栅投影法(基于结构光投影和条纹分析)和多相机拍摄特征匹配法(特征匹配重构三维形貌的方法;数字摄影测量法)。摄像机:2010 年,Dong 等人[34-35] 通过对活体蜻蜓翅膀进行特征点标记,用3 个正交分布的高速 CCD 摄像机(Photron Fastcam SA3 60k model)监控蜻蜓自由飞行,通过特征匹配和三维重构,实