




- @Rolandxxx
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
我们平常所提到的计算机的内存指的是动态内存(即DRAM),动态内存中所谓的“动态”,指的是当我们将数据写入DRAM后,经过一段时间,数据会丢失,因此需要一个额外设电路进行内存刷新操作。但时间一长,代表1的电容会放电,代表0的电容会吸收电荷,这就是数据丢失的原因。我们都知道,中间层是为了提供抽象转换而存在的,而这套叫做操作系统的中间层,定义了一套规则,使得后续的可执行程序能够更容易的被运行起来,而且
1.gcc是GNU Compiler Collection(就是GNU编译器套件),也可以简单认为是编译器,它可以编译很多种编程语言(括C、C++、Objective-C、Fortran、Java等等)。2.当你的程序只有一个源文件时,直接就可以用gcc命令编译它。3.但是当你的程序包含很多个源文件时,用gcc命令逐个去编译时,你就很容易混乱而且工作量大。
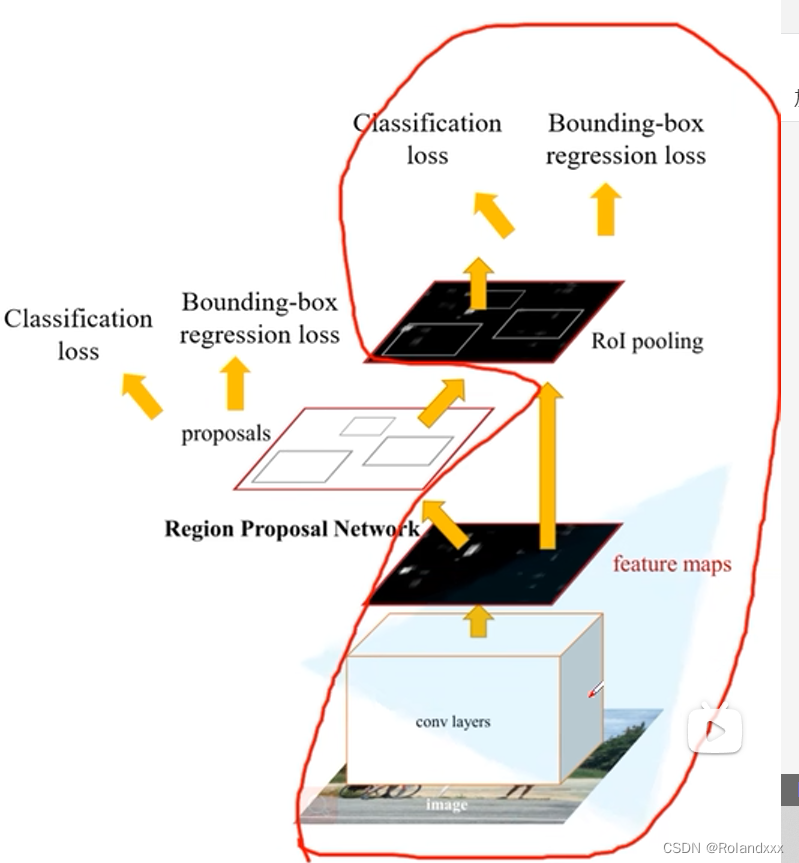
在目标检测领域,通常将网络的输出转为直观的检测框信息这一过程称为decode,就是根据网络的输出获取直观的检测框信息。那么encode就是将检测框信息(通常为ground-truth bounding box的坐标、宽高信息)转化为形为网络输出的信息,便于网络损失函数的求解。两阶段检测的框架就是先通过启发式方法(selective search)或者CNN网络(RPN)产生一系列稀疏的候选框,然后
它的主要思想是将高维的数据映射到低维,使该低维的数据能够反映原高维数据的某些本质结构特征。可以简单的将流形理解成二维空间的曲线,三维空间的曲面在更高维空间的推广。下图是三维空间中的一个流形,这是一个卷曲面,像一个瑞士卷一样,而3维空间中的曲面可以看做是2维的流形,因为曲面是2维的。n维空间中的m维流形就是具有m维几何形状的一个子集,在这里,m小于n。图上所标注的两个圈圈,在流形(把卷展开)上本距离
利用下面两条原则,便可大杀四方。
神经网络中的多维矩阵乘积运算:多维矩阵乘积运算乘积两项的维度都应该是相同的,如果有论文中有遇到矩阵乘积的两项维度不一致,那就考虑它计算时是使用了广播机制(如YOLACT)。所有大于二维的,最终都是以二维为基础堆叠在一起的!!所以在矩阵运算的时候,其实最后都可以转成我们常见的二维矩阵运算,遵循的原则是:在多维矩阵相乘中,需最后两维满足shape匹配原则,最后两维才是有数据的矩阵,前面的维度只是矩阵的

在目标检测领域,通常将网络的输出转为直观的检测框信息这一过程称为decode,就是根据网络的输出获取直观的检测框信息。那么encode就是将检测框信息(通常为ground-truth bounding box的坐标、宽高信息)转化为形为网络输出的信息,便于网络损失函数的求解。两阶段检测的框架就是先通过启发式方法(selective search)或者CNN网络(RPN)产生一系列稀疏的候选框,然后
想要充分理解粒子滤波算法,必须得从贝叶斯滤波器开始理解起来,因为卡尔曼滤波和粒子滤波都是基于此的。动态模型是指两个函数或者说两个模型(状态模型和观测模型):一个函数的输出为当前时刻的状态,输入为上一时刻的状态和噪声。另一个函数的输出是当前时刻的观测,输入为当前时刻的状态(这个状态是更新调整后的)和噪声。卡尔曼滤波限制噪声时服从高斯分布的,但是粒子滤波可以不局限于高斯噪声,原理上粒子滤波可以驾驭所有
它的主要思想是将高维的数据映射到低维,使该低维的数据能够反映原高维数据的某些本质结构特征。可以简单的将流形理解成二维空间的曲线,三维空间的曲面在更高维空间的推广。下图是三维空间中的一个流形,这是一个卷曲面,像一个瑞士卷一样,而3维空间中的曲面可以看做是2维的流形,因为曲面是2维的。n维空间中的m维流形就是具有m维几何形状的一个子集,在这里,m小于n。图上所标注的两个圈圈,在流形(把卷展开)上本距离
极几何描述了同一场景或者物体在两个视点图像间的对应关系。下图中的O1和O2分别是两个相机的光心,即摄像机坐标系的原点。由下图可知给定了一个三维空间下的P点,虽然不知道对应的成像平面上像素点p和p’在哪个位置,但是我知道它一定在l和l’这两条极线上。这样就不会全图去找了,只用在极线上去搜索了。再比如给定一个图像上的p点,找另一个图像上对应的p’点就可以通过极几何约束,将搜索范围缩小到对应的极线上本质