




- @PhD0791
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
KinectAzure在人形机器人中主要用于动作捕捉、遥操作和环境感知。其优势在于多模态传感器集成、高精度深度感知和成熟的开发生态,但存在精度不足、计算资源依赖和环境适应性等局限。未来发展方向包括传感器优化、AI融合和应用场景拓展。虽然KinectAzure已停产,但其技术路径仍将推动人形机器人感知系统的进步。
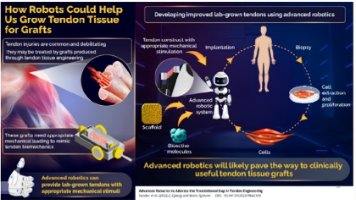
摘要:三元件模型是粘弹性力学中模拟材料复杂力学行为的重要工具,主要包括标准线性固体模型(SLS)和广义Kelvin模型,分别用于应力松弛和蠕变分析。SLS模型通过弹簧与Maxwell单元并联描述瞬时弹性和长期松弛,而广义Kelvin模型通过弹簧与Kelvin-Voigt单元串联表征多阶段延迟弹性。该模型在肌腱力学模拟、生物材料设计和柔性机器人等领域有广泛应用。但线性假设限制了其对非线性行为的精确描
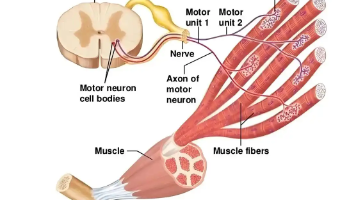
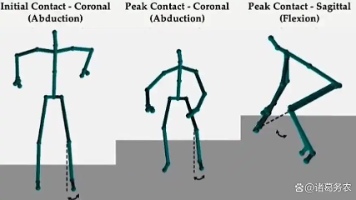
摘要:关节功率计算是生物力学分析的核心指标,通过逆向动力学方法结合运动捕捉和测力数据,计算关节力矩与角速度的乘积(P=τ×ω)。正负功率分别表示能量输出(如踝关节推进)与吸收(如膝关节缓冲)。计算过程包括数据预处理、运动学分析、动力学建模和功率计算,需注意噪声处理与坐标系校准。逆向动力学虽能精确量化关节能量传递,但存在计算复杂、实时性差等局限。该方法在运动康复、外骨骼设计等领域具有重要应用价值,未
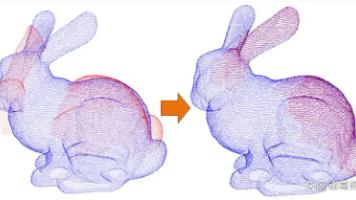
摘要:点云配准是将不同视角或时间的点云数据对齐到同一坐标系的过程,核心是寻找最优刚体变换(旋转矩阵R和平移向量t)。经典ICP算法通过迭代最近点匹配和SVD分解实现,但易陷入局部最优且对初始位姿敏感。改进方法包括Point-to-Plane ICP、鲁棒损失函数和特征描述子匹配。全局配准算法(如RANSAC)和深度学习方法(如端到端网络)进一步提升了性能。ICP在人形机器人中应用广泛,但面临初始位
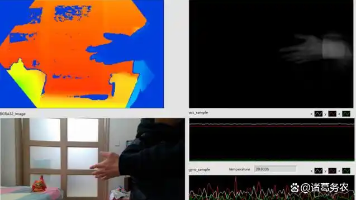
Azure Kinect是一款高性能深度感知开发工具包,配备ToF深度摄像头、RGB传感器和7麦克风阵列,支持高精度3D场景重建和人体骨骼追踪。其硬件设计紧凑但功能强大,深度感知采用AMCW时差测距技术,有效范围达0.25-3.86米。提供丰富的SDK支持多种开发语言,并与Azure云服务深度集成。应用涵盖工业检测、VR/AR、医疗康复等领域,虽然成本较高,但凭借精准的深度感知和强大的AI能力,成
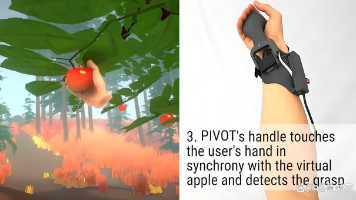
摘要: 人形机器人在特殊教育领域展现出多方面的价值: 技术融合:通过高精度传感器、AI算法与3D渲染技术提升交互体验,如手语教学机器人结合动作捕捉与情感计算,实现更自然的沟通。 个性化支持:基于实时反馈调整教学策略,如自闭症儿童社交训练中NAO机器人结合ABA疗法,提供标准化互动与数据记录。 康复辅助:游戏化外骨骼机器人(如Atlas2030)通过任务导向训练促进脑瘫儿童运动功能恢复,并融入脑机接
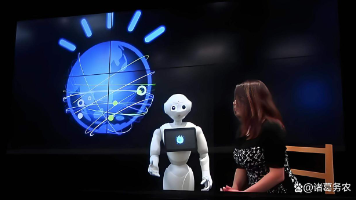
本文系统探讨了人形机器人在职业教育与AI素养教育中的应用现状与发展趋势。在职业教育领域,人形机器人通过共建产教融合平台、开展实景验证等方式融入实训教学,但面临成本高、技术更新快等挑战。AI素养教育方面,芬兰等国的实践表明人形机器人可作为有效的教具,通过互动设计促进跨学科学习。文章同时指出当前教育AI存在数据安全、算法偏见等问题,强调未来应注重人机协同、伦理教育和个性化发展。总体而言,智能技术在教育
当看到一个人形的、完美的、智慧的“我们”,但又远胜于人类,很多人感受到的可能不是恐怖谷,而是弥赛亚降临:终于有更高等的存在可以接管这个糟糕的世界,承担起人类无法承担的责任。对握权柄者而言,这简直是完美的“全能代理”:永不叛变,执行力无穷,同时又具备人类的柔性理解力。所以,最终不会被淘汰的,可能正是这场提问本身所体现的、那种明知不可为而为之的追问本能——哪怕它终将被收录为一段启动代码,或者一个展品说

多传感器融合感知算法通过整合摄像头、激光雷达和毫米波雷达的异构数据,克服单一传感器的局限性。核心在于数据级、特征级(主流)和决策级三个层次的融合,其中BEV空间与Transformer架构成为技术前沿。关键挑战包括数据对齐敏感性、异构数据关联、网络设计复杂性及极端场景鲁棒性。研究重点聚焦BEV融合、Transformer应用、鲁棒性策略和轻量化部署。发展趋势呈现深度融合、端到端学习、多任务统一化和
解决可能出现的报错:如果启动时提示 "Model context window too small",需要手动修改 OpenClaw 的配置文件 C:\Users\用户名\.openclaw\agents\main\agent\models.json,将 context_window 的值改为 32768。工作者:接收到任务后,有的负责写前端代码,有的负责后端,有的负责测试,分工协作,最终交付一个
