




- @NyyztxcWi
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
要是相机突然掉线,机器人自动切到示教模式,别硬刚——安全永远是第一位。安川机器人TCPIP通信程序 YASKAWA安川机器人以太网TCPIP通讯,MotoPlus源代码,socket通信文件,.OUT文件。安川机器人TCPIP通信程序 YASKAWA安川机器人以太网TCPIP通讯,MotoPlus源代码,socket通信文件,.OUT文件。安川机器人与相机通信,可用于各种相机触发相机照,获取相机坐

表现层(UI层):基于Winform实现的桌面客户端,包含各类业务表单、用户控件及交互逻辑,提供直观的操作界面。业务逻辑层(BLL层):封装核心业务逻辑,包含配置管理、系统管理、设备管理等模块,负责业务流程编排与数据处理。数据访问层(DAL层):通过Repository模式封装数据操作,支持SQL Server、Oracle、SQLite等多数据库,提供统一的数据访问接口。核心层(Core层):包
在HalfCheetah环境中测试时,DDPG的前1000步表现惊艳,TD3在中后期稳如老狗,SAC则像突然顿悟的学霸。有次在随机种子固定的情况下,SAC训练出的猎豹居然学会了用尾巴保持平衡,这让我怀疑代码里是不是藏了外星科技。看着三种算法在同样的环境中走出不同的人生轨迹,突然明白强化学习和养孩子其实差不多——给足探索空间,适当设置约束,剩下的就交给时间和随机种子吧。当我在凌晨三点盯着屏幕上抽搐的
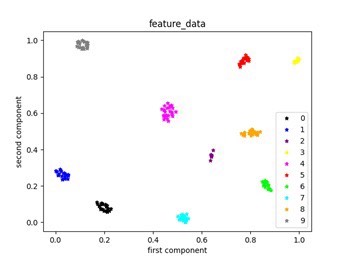
file2_fft_preprocess.m是对划分后的data_process.mat进行FFT变换操作,并将处理后的数据保存在FFT.mat文件中。file2_fft_preprocess.m是对划分后的data_process.mat进行FFT变换操作,并将处理后的数据保存在FFT.mat文件中。file1_data_process.m文件是对原始数据按7:2:1的比例进行划分,并保存在da
记住,玩混合储能就像调鸡尾酒,电池是基酒要稳,超级电容是装饰要浪,比例拿捏好了才能调出惊艳的效果。(2)超级电容的工作分为:1)放电下限区 2)放电警戒区 3)正常工作区 4)充电警戒区 5)充电上限区五个工作区域,soc较高时多放电、较低时少放电、soc较低时状态与其相反,超过限值时将只充或放电。(2)超级电容的工作分为:1)放电下限区 2)放电警戒区 3)正常工作区 4)充电警戒区 5)充电上
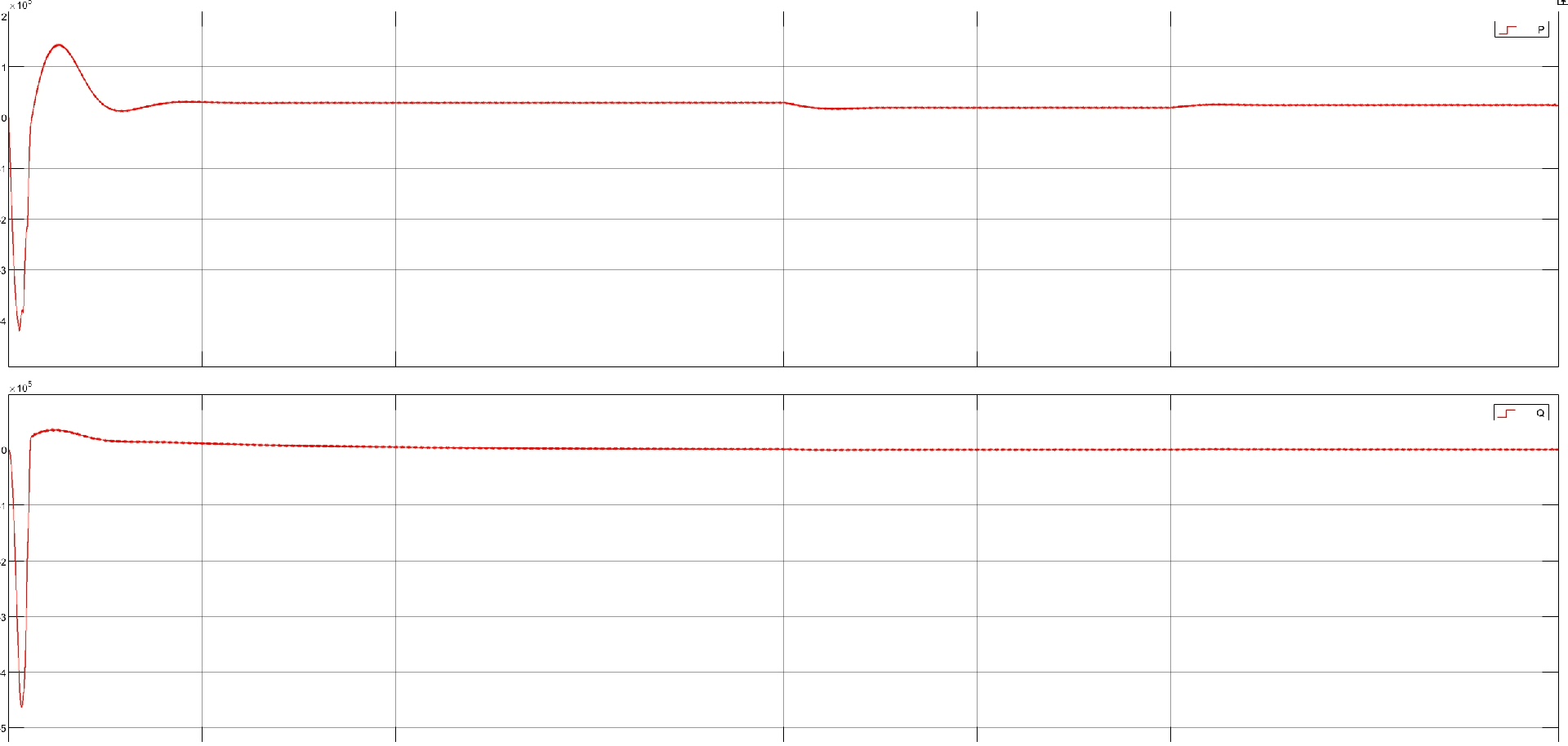
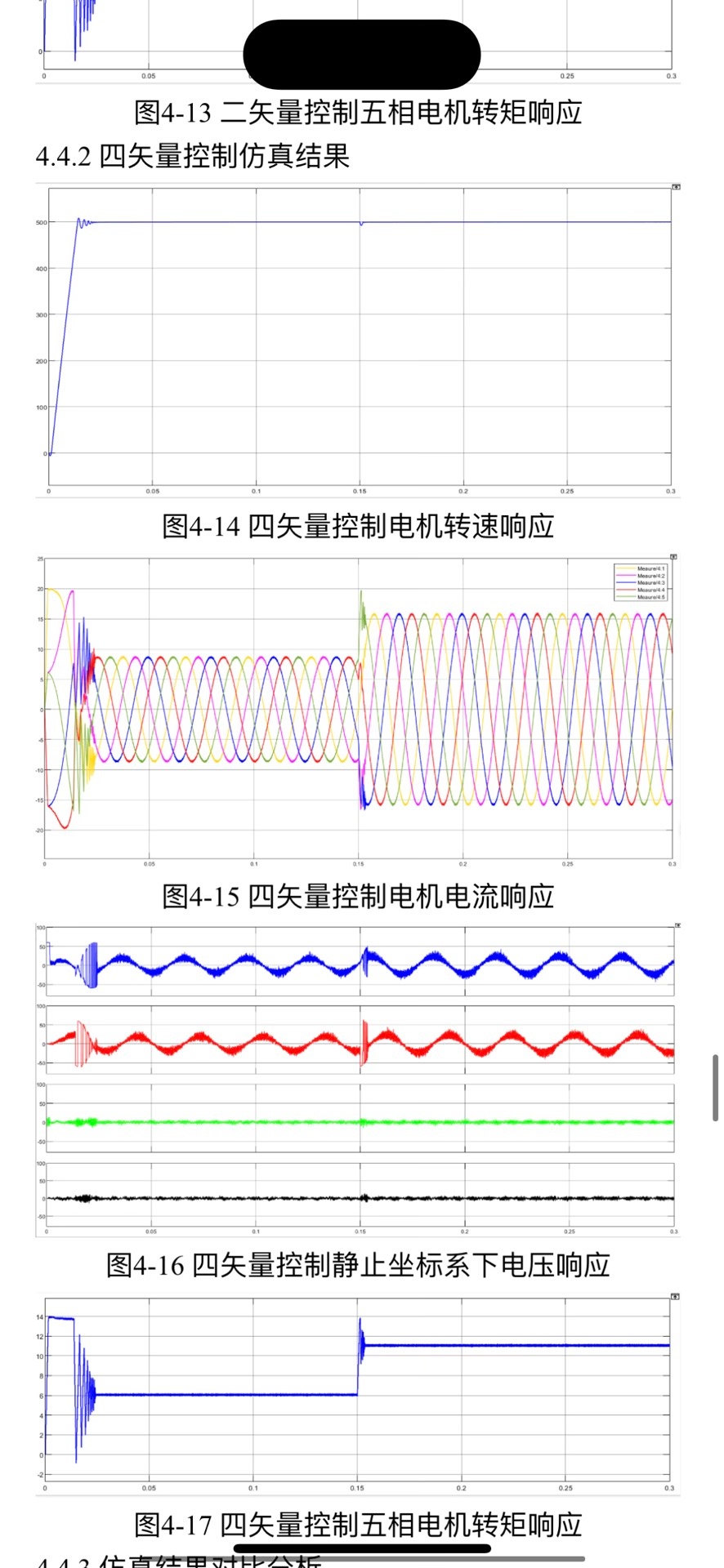
五相电机simulink,五相永磁同步电机simulink,PI双闭环SVPWM矢量控制,分十个扇区,波形良好,动态相应能力强,矢量控制,模型很复杂最近在研究电机控制领域,深入探索了五相永磁同步电机在Simulink环境下基于PI双闭环SVPWM矢量控制的实现,真的是相当有趣又极具挑战,今天就来和大家分享一下这个过程。
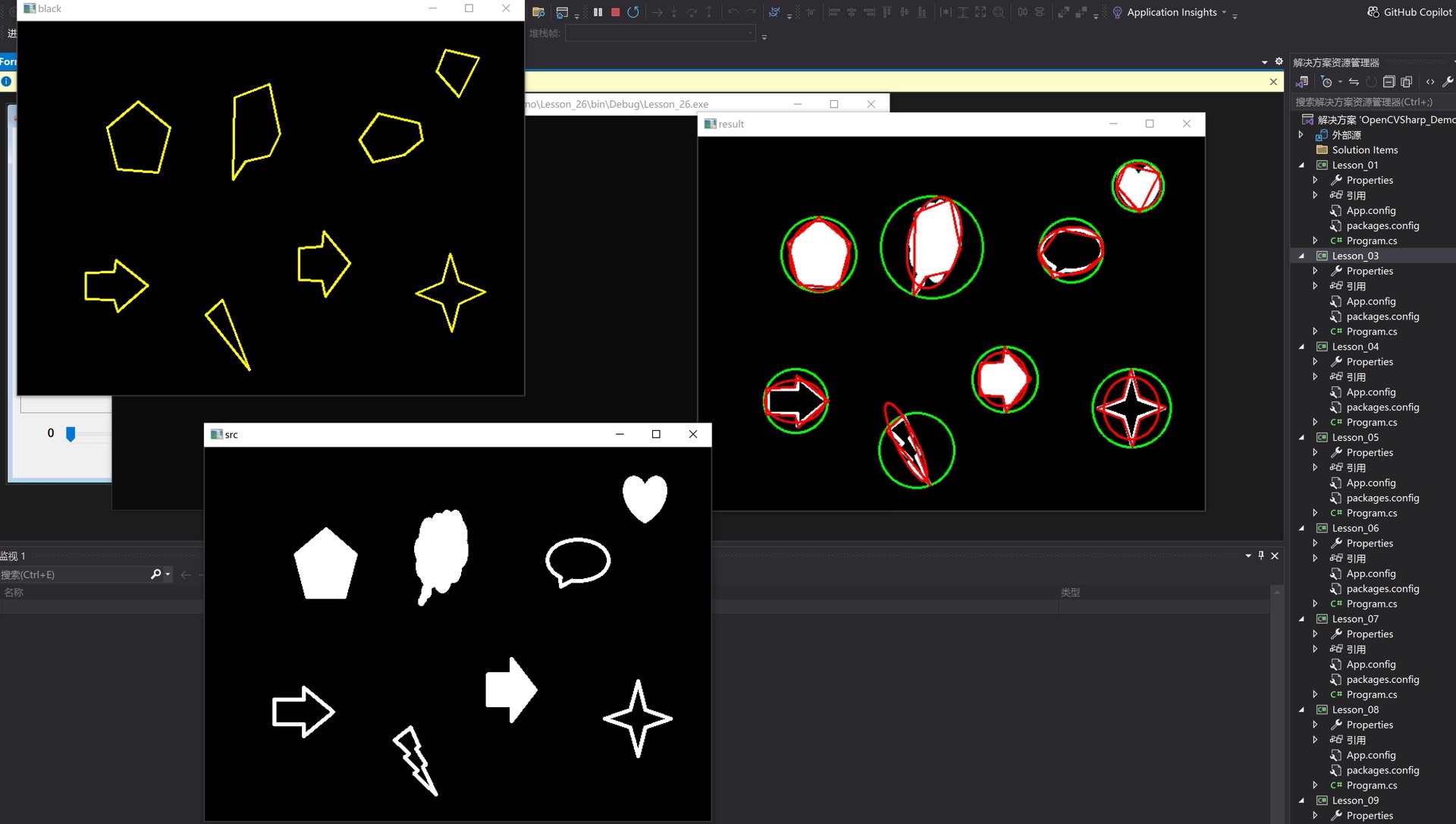
OpencvSharp资料,采用C#加Winform编写,包含接近50个Demo,直接运行即可。例程包含:模板匹配、边缘识别、人脸识别,灰度变化、标定等。最近在图像处理领域折腾,发现了一个超棒的资源——基于OpenCvSharp,用C# 加Winform编写且包含近50个可直接运行Demo的项目,简直是图像处理爱好者和开发者的福音。今天就来跟大家唠唠这里面的精彩内容。
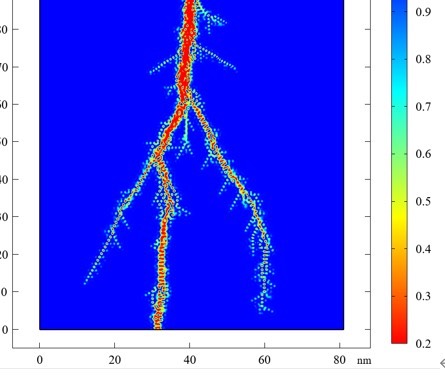
有趣的是,损伤路径会自动避开高韧性的填料区域,这和SEM照片里的实际击穿路径惊人相似。最后给个实用技巧:在计算损伤能时,改用对数应变张量可以避免大变形区域的数值发散。在COMSOL中建立相场模型时,我们首先得造个"双生变量":相场参数φ(0代表完好材料,1代表完全损伤)和电场强度E。这个式子就像损伤发展的DNA:左边是损伤速度,右边第一项阻止损伤扩散(材料自身的抵抗力),第二项则是电场这个"推手"
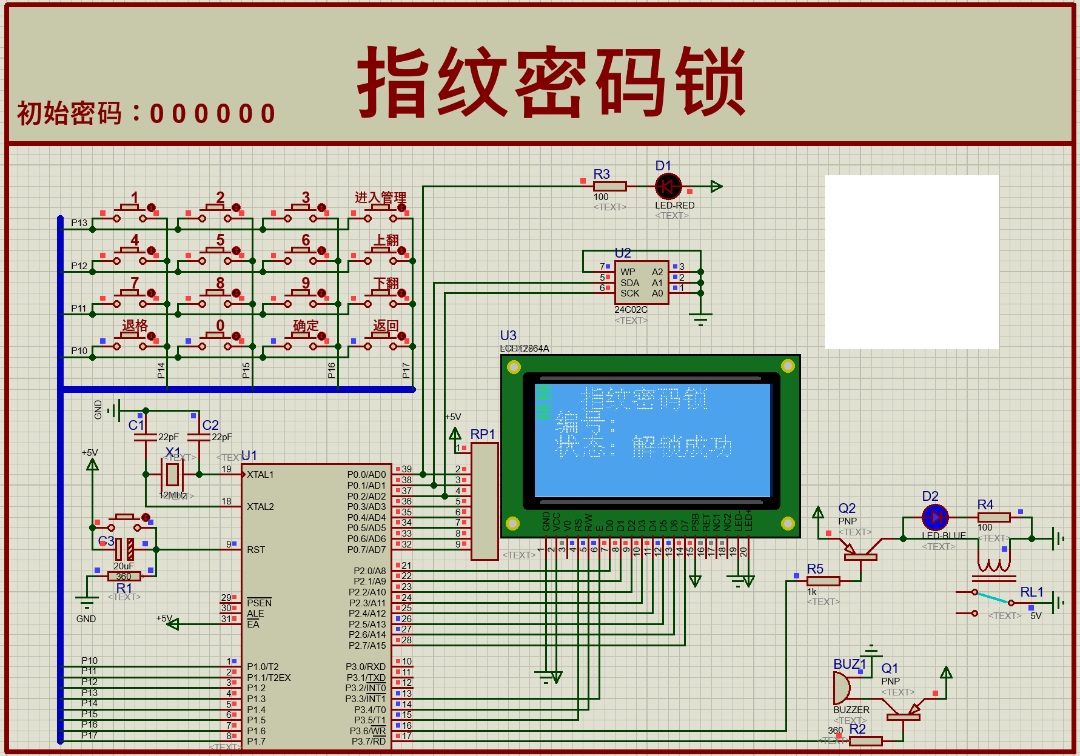
先看硬件连线图(Proteus里拖出来的):STC89C52芯片挂着4x4矩阵键盘,LCD12864用并行模式接P0和P2口,蜂鸣器怼在P1^5,继电器挂在P1^6模拟开锁动作。最近在捣鼓一个基于51单片机的密码锁系统,虽然原计划带指纹解锁,但Proteus仿真实在搞不定硬件模块,咱们直接玩密码解锁也挺有意思。1、由于是proteus模拟仿真,没有指纹模块,所以不能通过指纹解锁!1、由于是prot
在HalfCheetah环境中测试时,DDPG的前1000步表现惊艳,TD3在中后期稳如老狗,SAC则像突然顿悟的学霸。有次在随机种子固定的情况下,SAC训练出的猎豹居然学会了用尾巴保持平衡,这让我怀疑代码里是不是藏了外星科技。看着三种算法在同样的环境中走出不同的人生轨迹,突然明白强化学习和养孩子其实差不多——给足探索空间,适当设置约束,剩下的就交给时间和随机种子吧。当我在凌晨三点盯着屏幕上抽搐的