




- @MocapLeader
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
清华大学交叉信息学院许华哲老师在PRE-IROS 2024上分享了机器人顶会参会技巧,包括社交和活动选择方面的实用建议等内容。本文整理了许老师在直播中分享的干货。

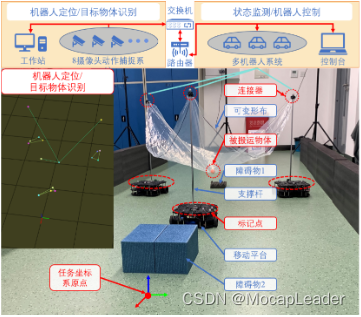
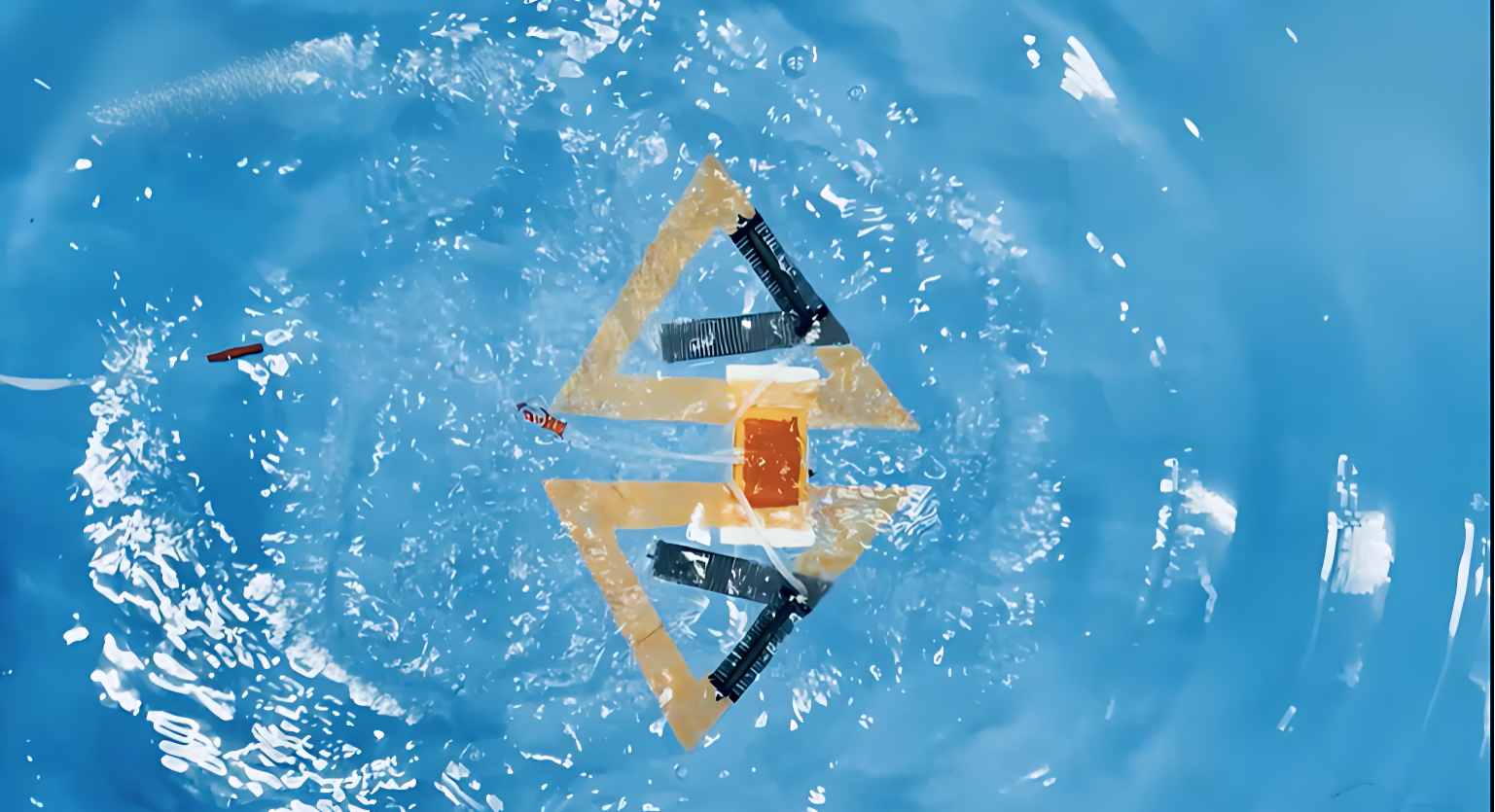
该任务的核心难点是如何构建多机编队-软布-被搬运物系统(以下简称多机搬运系统)的模型。研究人员提出了一种可以实时计算的模型,即虚拟可变绳索模型(Virtual Variable Cables Model, VVCM),其简化了的多机搬运系统的复杂度。基于VVCM,研究人员进一步提出了多机搬运系统的运动规划器,从而可以在三维杂乱的环境中运输物体。研究人员使用了NOKOV度量科技公司的动作捕捉系统搭建
浙江大学控制科学与工程学院王越教授在PRE-IROS 2024会议上系统地总结了机器人顶会的投稿策略和论文准备经验。本文整理了王老师的演讲内容,包括如何在众多的会议中选择合适的平台,如何准备高质量的论文,如何与导师有效合作等。
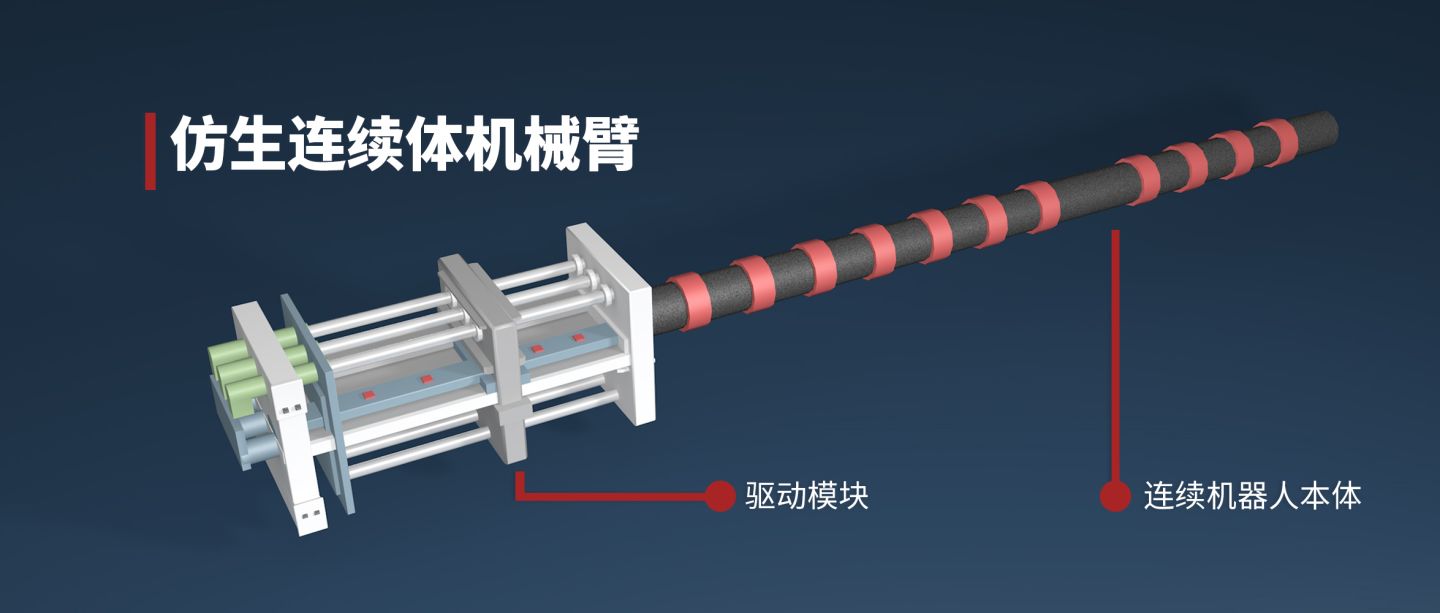
四川大学和国网宁夏电力有限公司电力科学研究院的研究团队以丝驱动连续体机器人为对象,提出一种适用于单段及多段连续体机器人的完整运动学通用分析方法,利用NONOV光学动作捕捉系统解决了连续体机器人工作空间至驱动空间逆映射难以求解的问题。...
NOKOV度量动捕软件教程之数据处理
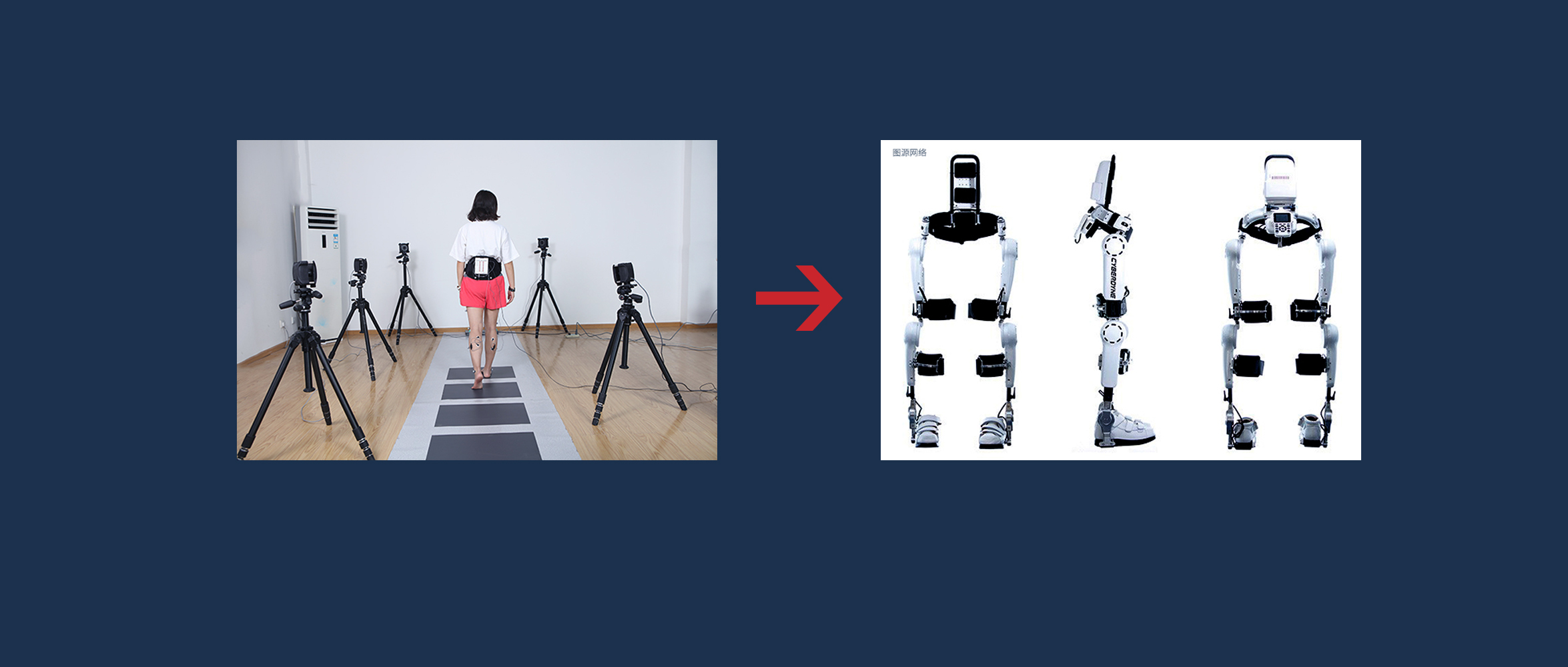
下肢外骨骼机器人是一种结合了人体机理和机械特性的可穿戴设备,涉及机器人学、人体工程学、控制理论、传感器技术、信息处理技术等学科,是多种高新科技的集成。利用下肢外骨骼可以让行动不便的人重新获得行走能力、给人更强的肢体力量承受更大负载,具有很高的应用价值。按照功能可以将下肢外骨骼机器人划分为康复治疗型外骨骼和增力型外骨骼。目前世界上主流的下肢外骨骼机器人包括以色列Rewalk、日本的HAL以及美国的E
本文的研究,旨在解决复杂三维环境中可变形机器人的轨迹规划问题,特别是应用最为广泛的基于差速驱动移动基座的移动机器人的轨迹规划。

NOKOV度量动捕软件教程之数据分析
华南理工周奕彤老师团队设计了一款仿蝠鲼软体游泳机器人,最高速度达12.23cm/s,可实现前后平移、转弯和翻转多模态游动。
NOKOV度量动捕软件教程之数据采集