
写文章




- @Marcus1231
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
立体匹配4——利用视差后处理完善结果
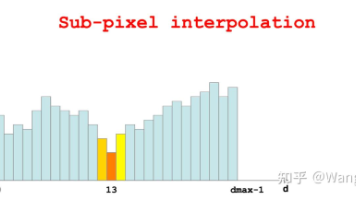
本文介绍了立体匹配算法中的视差后处理技术,主要包括五个方面:1)亚像素插值方法,通过抛物线拟合实现浮点视差计算;2)图像滤波技术如中值滤波、形态学处理等基础优化手段;3)双向匹配的左右一致性检查方法及其改进的单次匹配方案SMP;4)基于分割的视差优化方法,通过超像素分割和鲁棒平面参数估计提升精度;5)鲁棒平面拟合技术如RANSAC和直方图投票法。这些方法能有效纠正视差图中的错误并提高精度,其中基于
立体匹配7——经典算法ADCensus
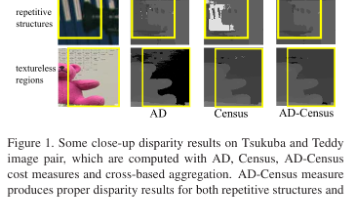
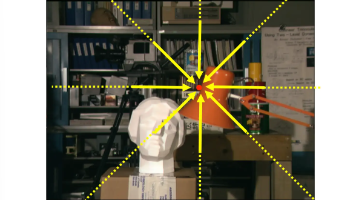
本文介绍了ADCensus立体匹配算法的完整流程。算法首先通过融合Census结构特征和AD亮度差异特征进行代价计算,然后采用可变形状支持窗进行多方向代价聚合。接着使用扫描线优化方法减少噪声,并通过视差后处理步骤进一步优化结果,包括错误检测分类、区域投票、分情况插值、边缘修正和亚像素增强等处理。实验结果表明,该方法能有效处理图像中的平坦区域、重复结构和遮挡等问题,最终生成高精度的视差图。整个算法在
立体匹配3——立体匹配算法中的视差优化
本文系统介绍了立体匹配中的视差计算与优化方法。主要内容包括:1. 全局优化算法(图割法、置信度传播、合作优化),通过最小化能量函数实现视差优化,效果好但计算量大;2. 一维优化算法(动态规划、半全局匹配),在扫描线方向优化,效率高但存在水平撕裂问题;3. 局部一致性优化,作为后处理步骤提升精度,结合超像素分割可进一步改善效果。不同方法在精度、速度等方面各有优劣,需要根据应用场景权衡选择。
到底了