
写文章




- @Hopeless_Loop
简介
该用户还未填写简介
擅长的技术栈
未填写擅长的技术栈
可提供的服务
暂无可提供的服务
在 VMware Ubuntu 22.04.5 上搭建 Gazebo Harmonic + Ardupilot SITL 仿真环境教程
摘要:本教程详细介绍了在VMware虚拟机Ubuntu22.04.5系统上搭建Ardupilot SITL与Gazebo Harmonic仿真环境的完整流程。主要内容包括:1)安装Gazebo Harmonic及其依赖;2)获取并编译Ardupilot源码;3)配置Ardupilot Gazebo插件;4)启动仿真环境(需指定ogre渲染引擎解决VMware兼容问题)。完成搭建后,用户可模拟多旋翼
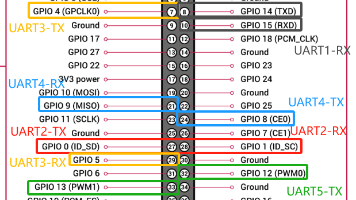
树莓派多串口指南(以树莓派4B为例)
树莓派提供了5个TTL电平的串口,其中UART1可直接使用,而UART2至UART5需要通过配置开启。用户可以通过编辑/boot/config.txt文件,添加相应的dtoverlay命令来启用这些串口。例如,启用UART2和UART3,需添加dtoverlay=uart2和dtoverlay=uart3。配置完成后,重启树莓派,并通过ls /dev | grep AMA命令验证串口是否成功开启。
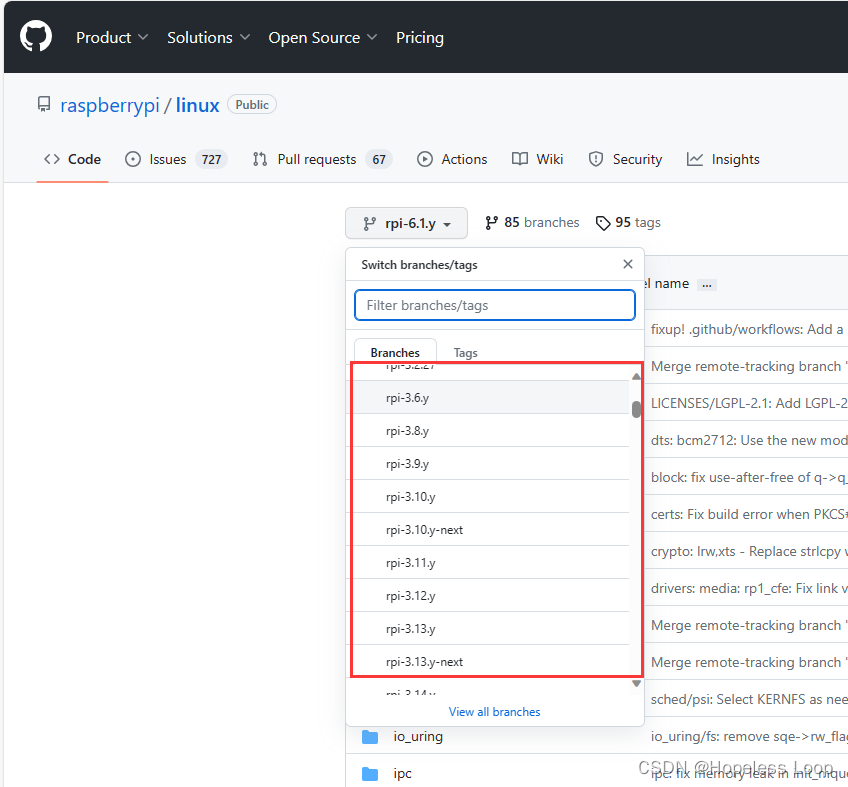
最详细的树莓派更换自定义内核步骤
本文主要介绍树莓派4B安装并使用TPM模块的方法及步骤。其他树莓派型号和TPM型号亦可参考本文以及本文给出的参考链接。
到底了