




- @Ezekiel_Mok
简介
该用户还未填写简介
擅长的技术栈
可提供的服务
暂无可提供的服务
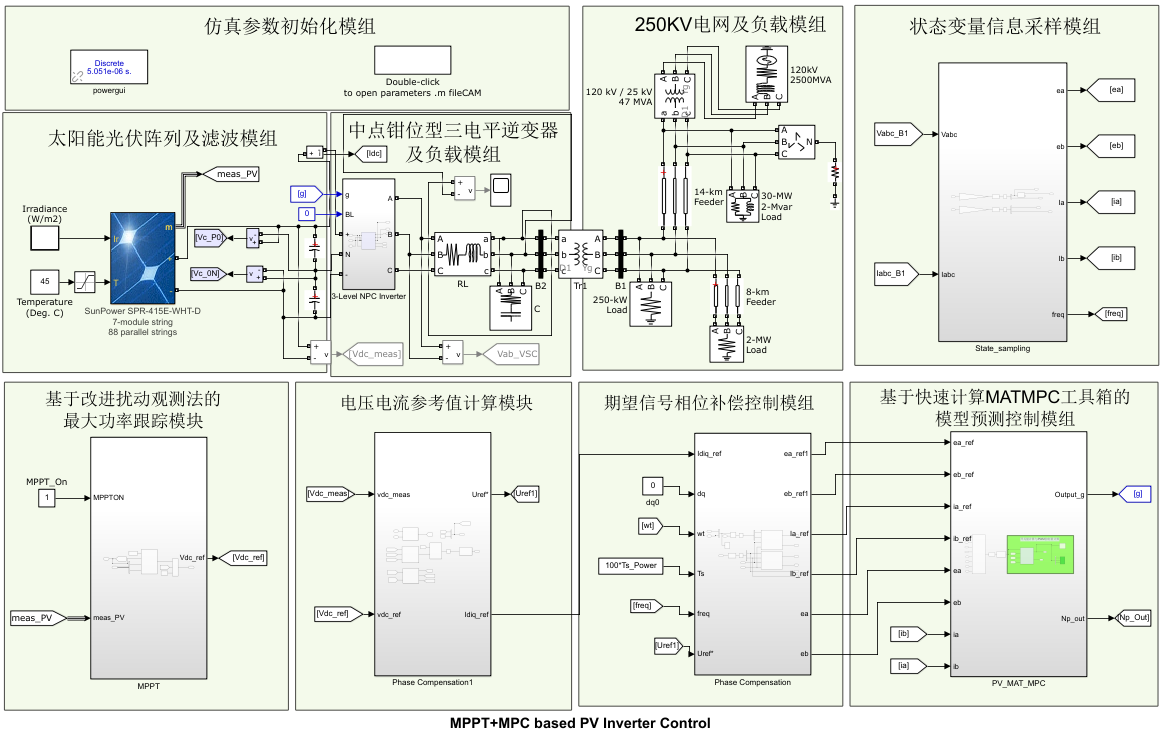
设计一种基于最大功率点跟踪与有限集模型预测控制结合的光伏并网逆变策略,针对模型预测控制算法在电网模型预测与控制时域中实时性不足等问题,引用快速求解MATMPC工具箱,降低MPC算法的单轮运算时间,显著提高系统的实时性与控制效果。针对功率波动、电流震荡与延时等问题,利用扰动跟踪法对最大功率点进行跟踪,采用2个采样周期预测值对计算和采样导致的延时进行补偿,功率能根据光照强度自适应调整,无功功率能迅速降
错误使用 SerialLink/ikineNumber of robot DOF must be >= the same number of 1s in the mask matrix由于ikine原设定不能直接求解6自由度以下的机器人。查robotics toolbox帮助文档,发现SerialLink.ikine的options里有一项’mask’ ,M mask vector (6 ×
四足机器人、行走控制。附带源码及虚拟样机设计方案。针对目前仿生四足机器人控制中存在的稳定性低、控制精度不高、可控性差等问题,本文引入一种基于CPG(中央模式发生器)的步态控制算法模型,CPG 生成的节律运动具有独立性与稳定性,还具有反馈调整功能,对波形调制处理后,能够实现仿生机器人的前进、后退、转弯、侧移、原地踏步等运动控制。针对仿生机器人研发周期长与成本高的问题,本课题利用Simulink与Ad
四足机器人、行走控制。附带源码及虚拟样机设计方案。针对目前仿生四足机器人控制中存在的稳定性低、控制精度不高、可控性差等问题,本文引入一种基于CPG(中央模式发生器)的步态控制算法模型,CPG 生成的节律运动具有独立性与稳定性,还具有反馈调整功能,对波形调制处理后,能够实现仿生机器人的前进、后退、转弯、侧移、原地踏步等运动控制。针对仿生机器人研发周期长与成本高的问题,本课题利用Simulink与Ad
ROS中Python话题发布与订阅入门|发布自定义话题|消息#!/usr/bin/env pythonfrom time import sleep, timefrom math import piimport threadingimport mathfrom matplotlib import pyplot as pltimport numpy as npimport rospyfrom sens